Torum 760 แสดงให้เห็นถึงความสามารถในการจัดการกับไตรรงค์ที่เปียกและไม่สุก
แม้ว่าการคว่ำบาตรทางการค้าจะทำให้ไม่สามารถซื้อ Torum 760 แบบโรเตอร์เดี่ยวที่มีกำลัง 490 แรงม้าในยุโรปได้ จาก. “ ใต้คันเหยียบ” และส่วนหัวขนาด 9 เมตรพวกเขายังคงจับตามองเครื่องพิเศษนี้ แสดงเป็นครั้งแรกที่ Agritechnica-2013 รถเกี่ยวนวดรุ่นนี้กลายเป็นเพื่อนร่วมชั้นของ Axial Flow 8230 จาก Case IH และ S680 จาก John Deere
เขาจัดหาเมล็ดพืชและฟาง ในรุ่นนี้เครื่องเกี่ยวนวดมีลูกกลิ้งป้อนลูกกลิ้งและตัวคั่นแบบหมุนและตัวคั่นเคาน์เตอร์แบบพับเก็บได้ มันเชื่อมต่อโดยตรงกับสายพานลำเลียง เมล็ดข้าวให้มากที่สุดเท่าที่จะเป็นไปได้ก่อนที่พืชผลจะถึงเชคเกอร์และมอเตอร์ไฟฟ้าจะใส่ส่วนเว้าเข้าไปในตำแหน่งโดยไม่ต้องใช้เครื่องมือใด ๆ
มีคันตัดยาว 7, 60 เมตรดูดซับข้าวสาลีได้มากกว่าห้าสิบเฮกตาร์ พวกเขาทั้งหมดได้รับการปรับปรุงหลายครั้งนับตั้งแต่ปรากฏตัวครั้งแรกในปี 2549 มันมีอุปกรณ์ชดเชยการเอียงแบบใหม่ถึงสิบสององศาโดยใช้กระบอกสูบไฟฟ้าเพื่อสร้างการเคลื่อนที่ข้ามตาข่ายและรักษาเกรนตลอดความกว้างแม้บนทางลาดชัน การจัดการหางกระรอกกำลังพัฒนาโดยมีการเปลี่ยนแปลงสามขั้นตอนในการตรวจสอบความถูกต้องเป็นแปด การปรับปรุงอีกประการหนึ่ง: ด้านล่างของสกรูเกรนที่สะอาดและตัวคัดแยกทำจากวัสดุคอมโพสิตทำให้ง่ายต่อการดึงกลับเพื่อทำความสะอาดเครื่องจักรอย่างสมบูรณ์ระบบการปรับความตึงของเส้นใหม่ทำงานจากพื้นดินและจลนศาสตร์จะง่ายขึ้นโดยการประหยัดกริดตัวเชื่อมต่อได้มากถึงสองเส้นตอนนี้แบ่งออกเป็นหกเพื่อให้ง่ายต่อการถอดประกอบ โมดูลไฟแช็ก
เครื่องนี้ประกอบขึ้นที่ไซต์การผลิตหลักของ บริษัท ใน Rostov-on-Don แต่ส่วนประกอบหลักจำนวนหนึ่งมาจากแบรนด์ระดับโลกที่มีชื่อเสียง ตัวอย่างเช่นมีดกลไกการขับเคลื่อนและตัวยกก้านผลิตโดย Schumacher ตอนนี้ส่วนหัวสามารถมีได้สองขนาดคือ 7- และ 9 เมตร แต่ Rostselmash วางแผนที่จะติดตั้งส่วนหัวที่มีความกว้างสูงสุด 12.5 ม. และติดตั้งระบบป้อนพืชที่ใช้งานอยู่
ในห้องโดยสารสิ่งเหล่านี้จะรวมการเปลี่ยนคันโยกช่วงสำหรับตัวเลือกไฟฟ้าซึ่งมาพร้อมกับการมาถึงของระบบเกียร์แบบไฮโดรสแตติกและเพลาขับแบบโอเวอร์ไดรฟ์ ในที่สุดสายพานลำเลียงก็เพิ่มขีดความสามารถ พล็อตสตรีมแห้ง มุงความสมบูรณ์ในสภาพแวดล้อมที่รุนแรง
คุณภาพของเมล็ดข้าวเป็นคำหลัก
ข้อ จำกัด ของการฟื้นฟูเมื่อมีสีเขียว เพื่อการใช้งานที่เหมาะสมปริมาณวัสดุต้องเพียงพอและสม่ำเสมอ สำหรับช่องเปิดตาข่าย: 14 มม. สำหรับตาข่ายก่อน 10 มม. สำหรับตาข่ายด้านบน 9 สำหรับตาข่ายด้านล่างและ 12 สำหรับตาข่ายสุดท้าย เมล็ดข้าวระบายน้ำได้เร็ว ด้านนอกบังเกอร์โอ่อ่ายั่วยวน เมื่อปิดแล้วจะไม่เกินหลังคาหัวเก๋ง นอกจากนี้เรายังชื่นชมปลายสกรูหมุนซึ่งเหมาะสำหรับการรีดท่อระบายน้ำ
ส่วนหัวขนาด 9 ม. ทำงานได้ดีในการทดสอบการเก็บเกี่ยวไตรรงค์ในสภาพฟางเปียกและเขียว ข้อได้เปรียบหลักของมันคือความสามารถในการติดตามภูมิประเทศ แต่ข้อเสียเปรียบหลักคือการตอบสนองช้าของระบบไฮดรอลิกของรีลและตำแหน่งของมอเตอร์ขับเคลื่อนรีลซึ่งยื่นออกมาทางด้านข้างมากจนมีความเสี่ยงสูงที่จะเกิดความเสียหาย อุปกรณ์มาตรฐานประกอบด้วยข้อต่อไฮดรอลิกแบบปลดเร็วจาก Egenolf แถบตัดธัญพืชขับเคลื่อนด้วยเพลาเดียวและส่วนหัวของข้าวโพดขับเคลื่อนด้วยเพลาขับสองอันอันหนึ่งอยู่ทางขวาและอีกอันทางด้านซ้าย
เมื่อสับฟางแล้วจะกระจายอย่างสม่ำเสมอตลอดความกว้างของการตัด เมื่อเลือกที่จะเก็บฟางต้องลดความเร็วของโรงสีลง เพียงใช้ล้อที่มีสันด้านขวาของตัวเครื่องจากนั้นลดฝากระโปรงลงเพื่อทำแนวขวาง ควรสังเกตว่าการออกแบบเครื่องไม่เหมาะสำหรับการจัดการฟาง อย่างไรก็ตามมีเทคนิคเช่นทำให้เครื่องบดมีความก้าวร้าวน้อยลงการเปลี่ยนใบพัดหมุนซึ่งมีผลต่อการไหลของเครื่อง
เครื่องจักรทั้งหมดได้รับใบพัดรุ่นล่าสุดซึ่งออกแบบใหม่ให้เหมาะกับวัฒนธรรมยุโรปทั้งหมด รถเกี่ยวข้าวกล่องใหญ่สามรุ่นสามารถติดตั้งระบบกันสะเทือนแบบไฮดรอลิกใหม่ได้ ชาวอเมริกันยังขยายข้อเสนอของแท่งตัด
โรงเรือนป้อนใช้ถัง 4 ถังในการป้อนพืชแทนที่จะใช้ระบบรางโซ่แบบเดิม การออกแบบนี้ต้องใช้โซ่ขับที่ด้านข้างของกล้อง ตัวแรกของกลองคือเครื่องตีแบบยกขึ้นมาพร้อมกับฟันลอกที่เซและนิ้วที่พับเก็บได้ซึ่งจะจับพืชผลจากส่วนหัวหรือเครื่องเจาะกระบะ กลองกลางสำหรับนวดข้าวและปรับระดับพืชจะหมุนด้วยความเร็วคงที่ เครื่องตีกลองแบบเร่งความเร็วตัวที่สี่ซึ่งหมุนด้วยความเร็วที่สูงขึ้นส่งมวลพร้อมกับเศษธัญพืชที่ยากต่อการนวดในการไหลสม่ำเสมอที่หนาแน่นไปยังโรเตอร์
ติดตั้งในหัวลำเลียงนำหินเข้าถังและควบคุมการไหลของวัสดุเมื่อเข้าสู่โรเตอร์ ตัวเลือกที่คำนึงถึงการเพิ่มประสิทธิภาพการเติมรถพ่วงอย่างรวดเร็ว ในห้องนักบินตัวควบคุมจะมีรหัสสีที่คอนโซลด้านขวา นอกจากปุ่มแกนและปุ่มแมนนวลแล้วยังมีปุ่มส่งสำหรับการเข้าถึงโดยตรงไปยังการตั้งค่าพื้นฐานต่างๆ คันโยกรวมคำสั่งทั้งหมดที่เกี่ยวข้องกับกองปัจจุบันนอกเหนือจากสกรูป้อนและท่อระบายน้ำ
โดยทั่วไปโรเตอร์จะซ้อนทับกันเป็นชั้น ๆ ของวัสดุที่จะเสียดสีกันเพื่อแยกเมล็ดข้าวออกจากฟาง ในการออกแบบในตอนท้ายใบมีดช่วยให้คุณเปลี่ยนทิศทางการเคลื่อนที่ของวัสดุได้ พวกเขายังทำหน้าที่เกี่ยวกับการไหลเวียนของอากาศซึ่งมีบทบาทในการแยกออก นอกจากนี้ยังมีและปรับได้คือใบพัดหมุนหกตัวที่มีเส้นผ่านศูนย์กลางต่างกัน
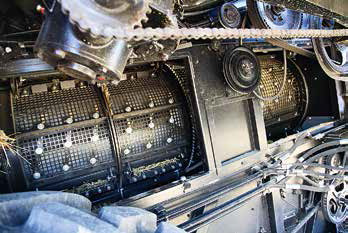
เครื่องเกี่ยวนวดในบ้านมีดาดฟ้าที่ผิดปกติซึ่งค่อยๆหมุนไปในทิศทางตรงกันข้ามกับโรเตอร์
ความเร็วของโรเตอร์ตั้งแต่ 250 ถึง 1,000 รอบต่อนาที ดาดฟ้าที่มีพื้นที่ 5.4 ม. 2 หมุนด้วยความเร็วไม่เกิน 8 รอบต่อนาที

กล่องเก็บเกี่ยวมีสกรูยึดหกตัวที่ไม่มีที่สิ้นสุดซึ่งหมุนด้วยความเร็วเท่ากัน การแบ่งออกช่วยให้สามารถบำรุงรักษาวัสดุได้ ทำหน้าที่บนโครงตาข่ายด้านบนเพื่อแนะนำการเคลื่อนไหวด้านข้างตามเปอร์เซ็นต์ของการเอียง มุ้งสามารถปรับได้ด้วยไฟฟ้าและจากหัวเก๋งหรือด้านนอกของเครื่องอย่างแม่นยำ การบำรุงรักษาตามปกติประกอบด้วยจุดหล่อลื่นเพียงสี่จุดที่เข้าถึงได้จากแท่นที่ด้านบนของเครื่องเพื่อหล่อลื่นแบริ่งสายพานหลัก ตัวกรองอากาศเข้าถึงผ่านบันไดทางเข้าด้านหน้าไปยังเครื่อง
โรเตอร์ Torum 3.2 เมตรดูดซับธัญพืชโดยใช้ล้อพาย 4 ล้อ ที่จุดเริ่มต้นของโรเตอร์จะมีการติดตั้ง scourges ตามแนวเส้น (สำหรับข้าวจะถูกแทนที่ด้วยหวี) และในตอนท้ายสว่านจะดึงมวลออกจากด้านหลังของโรเตอร์
เครื่องเกี่ยวนวดมีดาดฟ้าที่ไม่เหมือนใคร: หมุนไปในทิศทางตรงกันข้ามกับโรเตอร์ แม้ว่าจะมีความซับซ้อนในส่วนเชิงกลของการออกแบบ แต่ บริษัท เชื่อว่ามีข้อดีอย่างมากในการนวดข้าวและการแยกและลดความเสี่ยงของการอุดตัน
เครื่องสับฟางและเครื่องขูด
เราชื่นชมความสามารถในการทำความสะอาดเครื่องอย่างสมบูรณ์โดยการถอยจากด้านซ้ายของเครื่องกับดักด้านล่างของรางน้ำแบบเม็ดและการดูดซึม จำนวนช่วง: 2 doublers. ประเภทไดรฟ์: เครื่องกล ประเภทมีดโกน: ขับเคลื่อนด้วยระบบไฮดรอลิกพร้อมตัวกระจายสัญญาณแบบปรับได้ในห้องโดยสาร
ประเทศต้นทาง: สหรัฐอเมริกา รถเกี่ยวข้าวและรถเกี่ยว โมเดลการผสมผสานเหล่านี้ใช้ประสบการณ์มากกว่า 25 ปีในการผลิตเครื่องเก็บเกี่ยวเบอร์รี่และเพื่อตอบสนองความคาดหวังของลูกค้าที่มองหาเครื่องจักรที่เรียบง่ายและเชื่อถือได้ในราคาที่แข่งขันได้
ดาดฟ้าหมุนด้วยความเร็วคงที่ 8 รอบต่อนาทีและความเร็วของโรเตอร์แตกต่างกันไปตั้งแต่ 250 ถึง 1,000 รอบต่อนาที ผู้ปฏิบัติงานสามารถตั้งโปรแกรมความเร็วของโรเตอร์สองตัวและเปิดใช้งานผ่านเทอร์มินัลในหัวเก๋ง ไดรฟ์กลไกไฮโดรสแตติกของ Walterscheid มีหน้าที่ในการหมุนของโรเตอร์ซึ่งทำให้ความเร็วของมันแปรผันได้ไม่สิ้นสุด
โครงร่างที่ใช้มีข้อเสียเปรียบ: ช่องว่างระหว่างดาดฟ้าและโรเตอร์ถูกตั้งค่าด้วยตนเองโดยการหมุนน็อตปรับแม้ว่าช่องตรวจสอบจะมีขนาดใหญ่และมีขนาดที่อ่านได้ดีซึ่งควบคุมช่องว่างได้ จริงตามที่ตัวแทนของ Rostselmash จำเป็นต้องมีการปรับตัวไม่บ่อยนักซึ่งไม่สามารถ แต่ดีใจได้เพราะสำหรับงานนี้คุณต้องเข้าไปในรถและด้วยความเป็นไปได้สูงที่จะได้รับฝุ่น
รถให้เช่า! ตำแหน่งไฮดรอลิกของลำแสงหลัก บันทึก. ตัวเลือกนี้สามารถใช้ร่วมกับตัวเลือกต่างๆเช่นพวงมาลัยไฮดรอลิกปรับความสูงของล้อได้ ล้อปรับความสูงได้ด้วยระบบไฮดรอลิก - ให้การทำงานร่วมกันอย่างมีประสิทธิภาพโดยมีความลาดเอียงจาก 5% ถึง 12% สามารถใช้ได้กับรถแทรกเตอร์ที่มีการเชื่อมต่อไฮดรอลิกอย่างน้อยสองคู่โดยที่ไม่จำเป็นต้องมีการเชื่อมต่อไฮดรอลิกอื่น ๆ เพื่อใช้งานชุดจ่ายไฟ
ตัวเลือกนี้ไม่สามารถใช้ร่วมกับตัวเลือกเป็นพวงมาลัยไฮดรอลิกได้ แต่สามารถใช้ร่วมกับตัวเลือกต่างๆเช่นการกำหนดตำแหน่งไฮดรอลิกของคานหลัก ล้อหลังพวงมาลัยไฮดรอลิก ใช้กับรถแทรกเตอร์ที่มีข้อต่อไฮดรอลิกอย่างน้อยสองคู่โดยที่ไม่จำเป็นต้องมีการเชื่อมต่อไฮดรอลิกอื่น ๆ เพื่อใช้งานชุดจ่ายไฟ ตัวเลือกนี้ไม่สามารถใช้ร่วมกับตัวเลือกล้อปรับความสูงที่ควบคุมด้วยระบบไฮดรอลิกได้ แต่อาจใช้ร่วมกับตัวเลือกอื่น ๆ เช่นการวางตำแหน่งไฮดรอลิกของแถบเลื่อนฐาน
ในการทดสอบการเก็บเกี่ยวไทรติแคลกับทอรัม 760 รวมผลผลิตถึง 7-10 ตัน / เฮกแตร์ และความชื้นอยู่ที่ 16-18% อย่างที่เรากล่าวไปว่าฟางที่ยังไม่สุกทำให้สภาพแป้งมีความยุ่งยากมากโดยเฉพาะสำหรับเครื่องเกี่ยวนวดแบบหมุน

การตกแต่งภายในของรถแท็กซี่ Torum นั้นดูเรียบง่ายและไม่หรูหรา แต่ก็เป็นสถานที่ทำงานที่ดี
วาล์วไฟฟ้าสำหรับ ระบบไฮดรอลิก... หากชุดเครื่องผสมมีการติดตั้งรถแทรกเตอร์ที่มีการเชื่อมต่อไฮดรอลิกคู่ชุดเครื่องผสมจะต้องติดตั้งวาล์วไฮดรอลิกเพิ่มเติมเพื่อควบคุมระบบไฮดรอลิกส์ในกรณีที่จำเป็นต้องใช้งานชุดไฮดรอลิกหลายชุด แผงควบคุมติดตั้งอยู่ในห้องโดยสารของรถแทรกเตอร์โดยใช้กระบอกสูบไฮดรอลิกด้วยจอยสติ๊ก เครื่องเก็บเกี่ยวแต่ละเครื่องได้รับการติดตั้งตามมาตรฐานโดยมีการจัดเรียงเครื่องปั่นแนวตั้งแบบไฮดรอลิกซึ่งต้องใช้การเชื่อมต่อไฮดรอลิกอย่างน้อยหนึ่งคู่กับรถแทรกเตอร์
การเก็บและนวดพืชทำให้โรเตอร์ดังก้อง เป็นไปได้ว่าเครื่องจะทำงานเงียบขึ้นภายใต้สภาวะการทำความสะอาดปกติ คุณภาพการนวดเป็นเรื่องปกติและการสูญเสียไม่เกิน 0.5% โดยเฉลี่ย ความเร็วในการทำงานไม่เกิน 4 กม. / ชม. ความจริงก็คือด้วยความเร็วนี้เครื่องยนต์คัมมินส์ถึงรอบสูงสุด ภายใต้เงื่อนไขเหล่านี้ผลผลิตตามทฤษฎีคือ 28 ตัน / ชม. การตกแต่งภายในห้องนักบินเรียบง่ายและเป็นระเบียบเรียบร้อย การควบคุมพื้นฐานนั้นง่ายต่อการเข้าใจซึ่งเป็นสิ่งสำคัญสำหรับมือใหม่และพนักงานชั่วคราว ผู้ปฏิบัติงานไม่ควรคาดหวังมากจากระดับความสะดวกสบายเขาจะไม่พบระบบอิเล็กทรอนิกส์ที่ทันสมัยหรือ ฟังก์ชั่นอัตโนมัติ... อย่างไรก็ตามความเร็วของล้อขึ้นอยู่กับความเร็วและการควบคุมส่วนหัวได้รับการออกแบบมาเพื่อลดความล้าของล้อ
ตัวเลือกเพิ่มเติมใด ๆ จำเป็นต้องมีคู่ของการเชื่อมต่อไฮดรอลิกเพิ่มเติม ชุดค่าผสมและราคาที่เป็นไปได้มีดังนี้ การเก็บผลไม้อย่างมีประสิทธิภาพที่ความสูง 20 ซม. จากพื้นดิน สารเติมแต่งมาตรฐานสำหรับเก็บผลไม้จากพุ่มไม้ขนาดเล็กที่มีประสิทธิภาพการเก็บเกี่ยวต่ำที่ความสูง 20 ซม. จากดิน แพลตฟอร์มด้านกว้าง - สำหรับ 2 ชิ้น สายพานลำเลียงหรือส่วนขยายแพลตฟอร์มสำหรับบรรจุภัณฑ์ขนาดเล็ก - ไม่มีหัวหมุน ปลายหมุนสำหรับภาชนะ 2,500 กก.
ชุดสัญญาณไฟจราจรด้านหลังในเครือข่ายถนน ชุดภาชนะ OPTIMUM 500 กก. สำหรับภาชนะ 500 กก. เท่านั้นสำหรับสถานที่ที่เท่ากันและรวมถึงรายการต่อไปนี้: โถเก็บผลไม้แบบหมุนได้ในภาชนะสองตู้เคียงข้างกันทางลาดลูกกลิ้งสองคู่แท่นเสริมด้านข้าง สายพานลำเลียงสามารถปรับความสูงและตำแหน่งสำหรับการหยิบแบบเคียงข้างกันทางลาดลูกกลิ้งสองคู่แพลตฟอร์มด้านข้างเพิ่มเติม ภาชนะที่มีความจุ 500 กก. สำหรับระเบียงแบนเท่านั้นและมีองค์ประกอบต่อไปนี้: หัวฉีดแบบยาวที่หมุนได้พร้อมความยาวที่ปรับได้สำหรับการเก็บผลไม้ในภาชนะสองใบที่อยู่ด้านหลังอีกอันหนึ่งและยืนอยู่บนทางลาดยาวสำหรับเพลาซึ่งเป็นแพลตฟอร์มด้านข้างเพิ่มเติม
คอนโซลทางด้านขวาซึ่งมีคันควบคุมหลักได้รับการแก้ไขและไม่สามารถปรับได้ อย่างไรก็ตามจอยสติ๊กนั้นง่ายต่อการจับโดยให้การควบคุมสี่ปุ่มของส่วนหัวและรอกและมีตัวเลือกของค่าความสูงของการตัดที่ปรับแต่งได้สองแบบ อย่างไรก็ตามเป็นเรื่องน่าเศร้าที่ไม่มีการควบคุมการขนถ่ายที่ด้ามจับ ระบบเกียร์แบบไฮโดรสแตติก - กลไกด้วยหน่วยไฮดรอลิกของ Sauer Danfoss อาจมีความไวมากกว่าและคันเกียร์สามช่วงที่สูงและคล่องแคล่วบนคอนโซลไม่มีความนุ่มนวลที่ดีที่สุด
สายพานลำเลียงสามารถปรับความสูงและตำแหน่งสำหรับใช้ในภาชนะที่วางเรียงกัน ฟักเหนือแพลตฟอร์มการทำงาน แนะนำให้ใช้กลไกการลับคมยางสำหรับพื้นที่เพาะปลูกเล็กเพื่อปกป้องพืชผล สามารถใช้ได้กับแผ่นกันสั่นสามแผ่นด้านล่างเท่านั้น รถหัวลากสามจุด. เครื่องจักรและอุปกรณ์เฉพาะสำหรับน้ำมันและพืชพลังงานอื่น ๆ
อุปกรณ์เก็บเกี่ยว. บริษัท มีสี่ทางเลือก ส่วนหัวแต่ละส่วนประกอบด้วยโซ่ป้อนที่มีนิ้วหัวแม่มือด้านล่างซึ่งมีแผ่นฉีกขาดลูกกลิ้งดึงกลับสองตัวที่มีซี่โครงตามยาวและขดลวดโรเตอร์ด้านหน้าโรเตอร์พร้อมมีดเหลาด้วยตัวเอง 15 อันและมีดหมุนแนวนอนพร้อมมีดสองอัน โซ่ป้อนผ่านนิ้วหัวแม่มือป้อนก้านเพื่อบีบลูกกลิ้งที่มีเส้นผ่านศูนย์กลางต่างๆ พวกเขาดึงพืชลง ในขณะเดียวกันลูกกลิ้งที่มีมีดจะหมุนไปในทิศทางตรงกันข้ามและตัดก้านเป็นชิ้นเล็ก ๆ เพื่อให้เศษชิ้นส่วนหมุนได้อย่างรวดเร็วโดยไม่ต้องบดเพิ่มเติม

หูนวดใต้น้ำจะถูกนำไปแปรรูปใหม่ในอุปกรณ์นวดข้าวขั้นสุดท้าย

จุดบริการทั้งหมดสามารถเข้าถึงได้ง่ายโดยเฉพาะใกล้เครื่องยนต์คัมมินส์
เครื่องตัดแบบหมุนตั้งอยู่ที่ด้านหนึ่งของแถว พืชถูกตัดใกล้ดินมากและปล่อยให้ลำต้นสั้นมากซึ่งไม่เพียงพอต่อการอยู่รอดของศัตรูพืช เมื่อพืชถูกผลักออกลำต้นจะผ่านระหว่างแผ่นฉีกขาดที่ปรับได้ด้วยระบบไฮดรอลิก เมื่อข้อเหวี่ยงสัมผัสกับแผ่นกั้นลูกกลิ้งดึงจะทำให้แกนจานหรือที่จับหัก ข้อเหวี่ยงที่ถูกตัดจะถูกเคลื่อนย้ายจากโซ่ลูกกลิ้งฟีดไปยังสายพานลำเลียงตามขวางซึ่งรวบรวมข้อเหวี่ยงจากทุกส่วนของท่อร่วมส่วนกลางและป้อนเข้าในห้องสลิปรวม
ตะแกรงจะถูกปรับด้วยเทอร์มินัลในห้องโดยสารหรือด้วยมือจับพิเศษผ่านช่องตรวจสอบบนแผงตัวตะแกรง โดยทั่วไปการควบคุมจะอยู่ในตำแหน่งที่เรียบร้อยและมีป้ายกำกับชัดเจน ห้องนักบินมีความเรียบง่าย แต่ รายละเอียดที่จำเป็น: ปุ่มสำหรับเปิดใช้งานเครื่องสั่นซึ่งช่วยในการขนเมล็ดข้าวเปียก
Khedara สามารถติดตั้งกระปุกเกียร์สองสามหรือห้าสปีด สำหรับสภาพการทำงานที่รุนแรงของตัวแบ่งปลายตัวแบ่งกรวยสกรูแบบแอคทีฟสามารถใช้งานได้ด้วยระบบไฮดรอลิก ความแตกต่างกับรุ่นด้านหน้าคือไม่มีเครื่องตัดก้านแนวนอน ประกอบด้วยโซ่ป้อนที่มีนิ้วหัวแม่มือแผ่นฝ่าวงล้อมลูกกลิ้งหดกลับที่หมุนได้สองตัวพร้อมสกรูเรียวที่ด้านหน้าและมีดสี่เล่มที่ด้านหลัง ในขณะที่พวกเขาหมุนตัวดึงผู้ผลิตเบียร์จะดึงข้อศอกลงและหักออก แต่อย่าตัดออก
ข้อมูลพื้นฐานทั้งหมดเกี่ยวกับการทำงานของเครื่องยนต์จะแสดงบนหน้าจอขาวดำ ข้อเสียของมันคือตัวเลขที่น้อยมากดังนั้นความพยายามในการนำทางเมนูทำให้สับสนแม้กระทั่งผู้ที่ชื่นชอบอินเทอร์เฟซที่มีประสบการณ์ Rostselmash สัญญาว่าข้อบกพร่องนี้จะได้รับการแก้ไขและจะมีการติดตั้งหน้าจอสัมผัสในรุ่นปรับปรุง แต่ห้องโดยสารและส่วนควบคุมยังไม่ถึงระดับของการผสมผสานระหว่างประเทศที่ทันสมัย อย่างไรก็ตามหากคุณไม่พบข้อบกพร่องและไม่ได้กำหนดความต้องการที่สูงมากระบบปรับอากาศแบบธรรมดาเก้าอี้สปริงเชิงกลและการจัดหาพื้นที่ภายในก็เป็นไปอย่างสมบูรณ์แบบ โดยทั่วไปการมองเห็นนั้นดีมากและควรสังเกต หน้าต่างบานใหญ่ บังเกอร์. มีเบาะนั่งระบบกันสะเทือนอากาศและกล้องมองหลังที่เป็นอุปกรณ์เสริม

จอภาพในห้องนักบินยังไม่ชัดเจนเท่าไหร่ ระบบ Reichhardt GPS ช่วยให้ขับขี่ได้

การควบคุมเครื่องโดยใช้คอนโซลและจอยสติ๊กนั้นค่อนข้างง่าย
รายละเอียดเพิ่มเติม
- โรเตอร์ของเครื่องผสมตามด้วยกลองนวดรองที่มีดาดฟ้าปรับระดับได้
- คุณลักษณะเฉพาะของเครื่องจักรที่มีโรเตอร์หนึ่งตัว - เครื่องเกี่ยวนวดสร้างฟางเป็นแนวกว้างซึ่งสูงกว่าด้านข้างอย่างเห็นได้ชัดตามทิศทางการหมุนของโรเตอร์
- สับและเกลี่ยฟางจะเปิดและนำไปที่ตำแหน่ง "วางฟางเป็นแนว" หรือ "สับและกระจาย" ด้วยไดรฟ์ไฟฟ้า
- นอกจากนี้ยังสามารถปรับตัวเบี่ยงจากหัวเก๋งไปทางขวาและซ้ายได้อย่างอิสระ
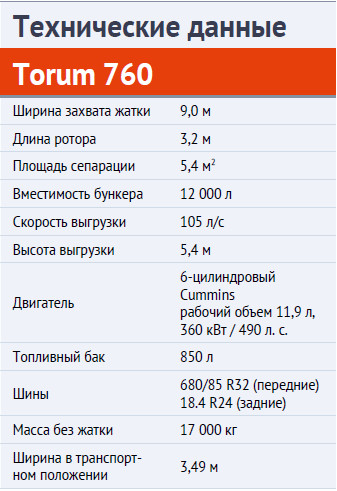
- เครื่องยนต์ - 6 สูบ 11.9 ลิตร Cummins 360 กิโลวัตต์ / 490 แรงม้า จาก. หน่วยทดสอบของเราติดตั้งรุ่น Stage IIIA พร้อมตัวกรองอนุภาค ตั้งแต่ปี 2015 เครื่องยนต์ได้รับระบบ SCR พร้อม AdBlue urea injection เพื่อให้เป็นไปตามข้อกำหนด Stage IIIB (Tier 4i)
- ลดน้ำหนักของ Torum 760 ที่ไม่มีส่วนหัวคือ 17 ตัน
- ด้วยยางหน้า 680/85 R32 และยางหลัง 18.4 R24 ความกว้างในการขนส่งคือ 3.49 ม.
- มีแทร็ก Zuidberg และระบบขับเคลื่อนสี่ล้อให้เลือก
- จุดบริการสามารถเข้าถึงได้ง่ายนอกจากนี้ยังมีถังซักมือและคอมเพรสเซอร์มาตรฐาน ระบบอัตโนมัติ สามารถติดตั้งจาระบีได้
ดังนั้น: Torum 760 โดดเด่นในด้านการแก้ปัญหาทางเทคนิคที่ไม่ธรรมดา การใช้เครื่องตีในทางลาดและดาดฟ้าที่หมุนไปในทิศทางตรงกันข้ามกับโรเตอร์จะเพิ่มระดับความซับซ้อนเชิงกลของเครื่องซึ่งดูเรียบง่ายและเชื่อถือได้ ผู้ปฏิบัติงานไม่ควรคาดหวังความสะดวกสบายระดับพรีเมี่ยมอย่างแน่นอน แต่ความคุ้มค่าของเงิน Torum 760 พร้อมส่วนหัว 9 ม. และรถพ่วงเสริมทำให้เป็นคู่แข่งที่คุ้มค่ากับเครื่องจักรตะวันตกและควรเป็นที่ต้องการ
0 ความคิดเห็น
อุปกรณ์ทั่วไปและกระบวนการทางเทคโนโลยีของเครื่องเกี่ยวนวดข้าว
1. ตัวชี้วัดเชิงปริมาณและคุณภาพของการรวมกัน
รถเกี่ยวข้าวได้รับการออกแบบมาสำหรับการเก็บเกี่ยวเมล็ดพืช เมื่อรวมกับอุปกรณ์พิเศษพวกเขาจะเก็บเกี่ยวข้าวโพดสำหรับเมล็ดพืชข้าวฟ่างบัควีทเรพซีดทานตะวันถั่วเหลืองเมล็ดพืชสมุนไพรหัวบีทน้ำตาลผักและพืชสมุนไพร การเก็บเกี่ยวพืชเหล่านี้มาพร้อมกับกระบวนการทางเทคโนโลยีดังต่อไปนี้โดยการรวมกัน: การตัดหญ้าหรือการเก็บลำต้นจากม้วนและขนส่งในเครื่องเก็บเกี่ยว นวดข้าวจากรวงและแยกออกจากฟาง ทำความสะอาดเมล็ดพืชจากสิ่งสกปรกและขนส่งไปยังบังเกอร์ รวบรวมฟางทั้งก้อนสับอัดหรือกระจายบนสนาม
การรวมกันเป็นแบบลากและขับเคลื่อนด้วยตัวเอง ที่พบมากที่สุดคือรถเกี่ยวข้าวที่ขับเคลื่อนด้วยตัวเอง ตามประเภทของการนวดแบบแยกส่วนการรวมจะแบ่งออกเป็นสองกลุ่ม: ด้วยเครื่องนวดแบบคลาสสิกและแบบโรเตอร์ตามแนวแกน กลุ่มแรกประกอบด้วย SK-5M "Niva", "Yenisei-1200", "Kedr-1200", "Don-161", "Don-1500B" ส่วนกลุ่มที่สองประกอบด้วย SK-10V "Rotor" ที่ขับเคลื่อนด้วยตัวเอง Don-2600” และเครื่องเกี่ยวนวดแบบลาก PN-100“ Prostor”
ลองพิจารณาอุปกรณ์และกระบวนการทำงานของกลุ่มแรกรวมโดยใช้ตัวอย่างของการรวม Don-1500B
การรวม "Don-1500B" (รูปที่ VIII.3) ประกอบด้วยส่วนที่เกี่ยว
A ซึ่งรวมถึงส่วนหัวตัวเว้นระยะ B และห้องป้อน C, นวดข้าว G, ถัง 10, รถ stacker 18, เครื่องยนต์ 8, เกียร์, แชสซี, ระบบไฮดรอลิก, หัวเก๋ง 6, ส่วนควบคุม, อุปกรณ์ไฟฟ้าและระบบควบคุมอิเล็กทรอนิกส์ของกระบวนการทางเทคโนโลยีและสถานะของหน่วย ในเครื่องผสม Don-1500 แทนที่จะเป็นรถ stacker คุณสามารถติดตั้งอุปกรณ์สากลสำหรับสับและรวบรวมฟางและแกลบในรถเข็นลากหรือกระจายไปทั่วสนาม
ด้านหน้า (ด้านหน้า) เชื่อมต่อกับเฟรมของเครื่องนวดข้าว U ส่วนหัวเชื่อมต่อกับสเปเซอร์ B แบบหมุนและสามารถแกว่งได้ทั้งในแนวยาวและแนวขวาง การเชื่อมต่อของส่วนหัวกับตัวเว้นระยะดังกล่าวช่วยให้มีความสามารถเมื่อรองเท้า 38 รองรับพื้นผิวสนามเพื่อคัดลอกความโล่งใจของสนามและรักษาระดับความสูงของการตัดที่ตั้งไว้ของพืชด้วยอุปกรณ์ตัด 39
วงเวียน 41, รอก 1, อุปกรณ์ตัด 39, สว่าน 3, รองเท้าคัดลอก 38 ติดตั้งที่ส่วนหัวในตัวเว้น B - บีตเตอร์ 37 และในห้องเอียง C - สายพานลำเลียง 4 ในการเลือกม้วนจะมีการติดตั้งปิ๊กอัพที่ส่วนหัวรอกจะถูกถอดออกและอุปกรณ์ตัด 39 ตัดการเชื่อมต่อ
ในพื้นที่ที่ใช้วิธีการเก็บเกี่ยวแบบแยกส่วนแทนที่จะเป็นส่วนหัวแท่นรับจะถูกแขวนไว้บนส่วนผสม
เครื่องนวดข้าวประกอบด้วยชิ้นส่วนและกลไกหลักดังต่อไปนี้: เครื่องนวดข้าวและเครื่องแยก (MSU) ซึ่งรวมถึงดรัม 5, เว้า 33 และผู้ตีกองหน้า 7, วอล์คเกอร์ 16, กระดานขนส่ง 32, การทำความสะอาด, เมล็ดข้าว 30 และหู 28 ดอก, เมล็ด 13 และสไปค์ ลิฟท์ 75 ตัวเครื่องนวดขั้นสุดท้าย 9 พร้อมกับสว่านกระจาย การทำความสะอาดซึ่งอยู่ใต้เครื่องเดินฟางประกอบด้วย 26 ตัวบน, 27 ตัวล่าง, ตะแกรงบานเกล็ด, ส่วนขยาย 25 และพัดลม 31 บนฝาปิดเครื่องนวดข้าวมีถัง 10 พร้อมกับ 12 และขน 11 สว่าน
ชุดล้อมีการติดตั้งล้อนิวเมติก: ล้อหน้า 35 และล้อหลัง 24 กลไกและล้อขับเคลื่อนทั้งหมดขับเคลื่อนโดยเครื่องยนต์ 8 การทำงานของชุดล้อจะถูกควบคุมโดยผู้ปฏิบัติงานโดยใช้ระบบไฮดรอลิกและกลไกที่เกี่ยวข้องซึ่งอยู่ในห้องโดยสาร
ขั้นตอนการทำงานของเครื่องเกี่ยวนวดดำเนินการดังนี้
นิ้วของปิ๊กอัพที่ติดตั้งบนส่วนหัวป้อนก้านจากม้วนไปยังแท่นหรือรอก 1 และวางก้านที่ตัดด้วยคัตเตอร์ 39 ไว้สว่าน 3 จะ จำกัด การไหลของก้าน (มวลเกรน) และนำพวกมันไปยังเครื่องตี 37 และจากนั้นไปยังสายพานลำเลียงแบบลอย 4. กิ่งล่างของลำเลียงลำเลียงก้านเข้าไปในหน่วยนวดข้าว ดรัมหมุน 5 กระทบการไหลของมวลเกรนเคลื่อนไปตามส่วนเว้า 33 และนวดมัน
มวลเมล็ดข้าวที่นวดแล้ว (กองหยาบ) ประกอบด้วยฟางเมล็ดพืชแกลบและสิ่งเจือปน ส่วนเล็ก ๆ ของกองหยาบเมล็ดพืชและแกลบมักเรียกว่ากองเมล็ดพืชขนาดเล็ก
ส่วนหลัก (70-80%) ของกองเมล็ดพืชในกระบวนการนวดข้าวจะผ่านรูเว้าและตกลงบนกระดานขนส่ง 32.
ฟางที่เหลือจากกองเมล็ดพืชจะถูกกลองโยนออกไปด้วยความเร็วสูง เครื่องตีสไตรเกอร์ 7 ลดความเร็วในการเคลื่อนที่ของฟางและส่งไปยังฟางวอล์คเกอร์ 16. ในระหว่างการเคลื่อนที่ของมวลไปตามตะแกรงนิ้วที่ติดตั้งใต้เครื่องตี 7 จะเกิดการแยกเมล็ดออกจากฟาง ผู้ตีจะถอนมวลนวดออกจากถังอย่างต่อเนื่องเพื่อป้องกันไม่ให้ก้านพันรอบ
ปุ่ม 16 ขั้นตอนของเครื่องเดินฟางทำการเคลื่อนไหวเป็นวงกลมเขย่าฟางอย่างเข้มข้น เมล็ดพืชและสิ่งสกปรกขนาดเล็กหกผ่านรูของแป้นและลงมาตามก้นที่เอียงไปยังกระดานขนส่ง 32 หวีของแป้นเคลื่อนฟางไปทางทางออกของเครื่องนวดข้าว
กองเมล็ดข้าวซึ่งจัดสรรโดยเว้าและตัวเดินฟางถูกเทลงบนกระดานขนส่ง 32 ลงบนตะแกรงบานเกล็ด 26 ด้านบนเพื่อทำความสะอาด เมล็ดข้าวจะตื่นขึ้นมาทางช่องของตะแกรงและตกลงไปที่ตะแกรงด้านล่าง 27. กระแสอากาศจากพัดลม 31 ถูกส่งไปที่ใต้ตะแกรงซึ่งจะนำสิ่งเจือปนที่มีแสง (แกลบ) ไปยังรถ stacker 18. เมล็ดข้าวที่ผ่านการทำความสะอาดแล้วซึ่งผ่านตะแกรงด้านล่างจะถูกรวบรวมไว้ในรางของสว่าน 30 ซึ่งป้อนโดยสายพานลำเลียงของลิฟต์ 13 เข้าสู่สว่าน 12 และบรรจุลงในถัง 10
ในขั้นตอนการนวดข้าวส่วนหนึ่งของหนามแหลมจะแตกออกจากลำต้นและไปทำความสะอาดโดยไม่ต้องนวดข้าว spikelets ดังกล่าวลงมาจากตะแกรงด้านบนไปยังส่วนขยาย 25 และผ่านช่องเปิดของส่วนหลังที่รั่วไหลเข้าไปในร่องของ ear auger 28 ซึ่งจะหยดลงบนสายพานลำเลียงแบบเอียง (ลิฟต์) 15 ซึ่งจะนำ spikelets เข้าสู่อุปกรณ์นวดสุดท้าย 9. โรเตอร์หมุนของอุปกรณ์โดยร่วมมือกับฟันเว้านวดใบหูและ ทิ้งกองที่เกิดขึ้นลงในปลอกสว่านซึ่งป้อนฮีปไปยังกระดานขนส่ง 32 ตามความกว้างทั้งหมด จากนั้นกองนี้จะเข้าสู่ตะแกรงทำความสะอาด 26 เพื่อแยกเมล็ดพืชออกจากมัน
สิ่งสกปรกขนาดใหญ่ (เศษเล็กเศษน้อย) ซึ่งไม่ผ่านช่องว่างของส่วนขยายพร้อมกับสิ่งสกปรกเล็กน้อย (ทางเพศ) จะถูกลบออกจากเครื่องนวด เมล็ดข้าวจะถูกขนออกจากถังโดยใช้สว่าน 11 ขณะเคลื่อนที่หรือหยุด
ในการรวบรวมฟางและแกลบให้แขวนรถ stacker แบบไฮดรอลิก 18 หรือเครื่องบดสับเข้าด้วยกัน ฟางจะถูกป้อนเข้าไปในรถ stacker โดยมีฟาง 77 และแกลบ - 23 แกลบกองที่ปั้นขึ้นจะถูกโยนลงในสนาม รถเกี่ยวข้าวที่มีเครื่องสับสามารถรวบรวมฟางสับพร้อมพื้นลงในรถเข็นที่ติดด้านหลังวางฟางเป็นแนวหรือกระจายไปทั่วสนาม
การออกแบบและหลักการทำงานของชุดค่าผสมที่เหลือของกลุ่มแรกนั้นโดยพื้นฐานแล้วจะเหมือนกัน พวกเขาแตกต่างกันในขนาดการจัดเรียงของแต่ละหน่วยปริมาณงานและผลผลิต
Combine "Don-161" ได้รับการออกแบบมาสำหรับการเก็บเกี่ยวพืชผลธัญพืชและพืชอื่น ๆ ที่ให้ผลผลิตสูง เครื่องเกี่ยวนวดมีระบบการนวดและการแยกที่ดีขึ้นเพิ่มพื้นที่ตะแกรงทำความสะอาดและความจุบังเกอร์ ชุดเครื่องผสมนี้สามารถติดตั้งส่วนหัวที่มีขนาดมาตรฐานสี่ขนาดและแท่นรับขนาดมาตรฐานสองขนาด รถเกี่ยวข้าวมีเครื่องสับหรือเครื่องดูดควันสำหรับวางฟางเป็นแนวขวาง
เครื่องเกี่ยวนวดข้าว "Yenisei-1200" ติดตั้งเครื่องนวดข้าวแบบสองถังและแยกอุปกรณ์ ใช้สำหรับการเก็บเกี่ยวเมล็ดพืชในสภาพที่มีความชื้นสูงของมวลเมล็ดข้าว มีการดัดแปลงเครื่องเกี่ยวนวดสามแบบ: "Yenisei-1200-1" ด้วยเครื่องนวดข้าวแบบถังเดียวสำหรับเก็บเกี่ยวเมล็ดพืชในพื้นที่ที่มีความชื้นต่ำ "Yenisei-1200N" สำหรับการเก็บเกี่ยวฟางยาวเปียกและเมล็ดพืชที่ค้างอยู่ในเขตปลอดเชอร์โนเซม ดัดแปลงหนอนผีเสื้อ "Yenisei-1200R" พร้อมดรัมหน้าสำหรับเก็บเกี่ยวข้าว
เครื่องเกี่ยวนวดข้าว "Kedr-1200" ติดตั้งอุปกรณ์นวดและแยกดรัมเดี่ยวและการดัดแปลง "Kedr-1200N" และ "Kedr-1200R" นั้นมีกลองสองถัง เครื่องผสม Kedr-1200R มีกลองนวดแบบพินในขณะที่ Kedr-1200N มีดรัมสำหรับนวดข้าว รุ่นพื้นฐาน "Kedr-1200" ได้รับการออกแบบมาสำหรับการเก็บเกี่ยวเมล็ดพืชในสภาพความชื้นปกติ
การดัดแปลง "Kedr-1200N" ด้วยความสามารถในการข้ามประเทศที่เพิ่มขึ้น - สำหรับการเก็บเกี่ยวฟางยาวเปียกและเมล็ดพืชที่ติดค้างในเขตปลอดเชอร์โนเซม หนอนผีเสื้อรุ่น "Kedr-1200R" - สำหรับเก็บเกี่ยวข้าว
เครื่องเกี่ยวนวดข้าว "Don-091" พร้อมกับเครื่องนวดและแยกดรัมเดี่ยวออกแบบมาสำหรับการเก็บเกี่ยวเมล็ดพืชและพืชอื่น ๆ ในสภาพที่มีความชื้นปกติและสูง ลองพิจารณาอุปกรณ์และหลักการทำงานของรถเกี่ยวนวดข้าวกลุ่มที่สองโดยใช้เครื่องรวม SK-10 เป็นตัวอย่าง
รวม SK-10 (รูปที่ VIII.4) ซึ่งออกแบบมาสำหรับการเก็บเกี่ยวเมล็ดพืชที่ให้ผลผลิตสูงแตกต่างจาก Don-1500 ที่รวมอยู่ในเครื่องนวดข้าว ในเครื่องนวดข้าว SK-10 มีการใช้อุปกรณ์แยกการนวดตามแนวแกน - โรเตอร์แบบใหม่ซึ่งใช้โรเตอร์หมุน 24 ในการนวดข้าวแยกเมล็ดข้าวและเคลื่อนย้ายมวลเมล็ดข้าวไปยังเต้าเสียบแกนของการหมุนตั้งอยู่ตามแกนตามยาวของเครื่องนวดข้าว
โรเตอร์ประกอบด้วยส่วนรับ A, นวดข้าว B และส่วน C ที่แยกจากกันซึ่งแตกต่างกันในการออกแบบองค์ประกอบที่ใช้งานอยู่ซึ่งโรเตอร์ทำหน้าที่ในการไหลของลำต้น
ส่วนรับของโรเตอร์มีใบมีดแบบขดลวดสามใบ 26 และอยู่ในปลอกรูปกรวย 25 ชิ้นส่วน B และ C ของโรเตอร์อยู่ในปลอกทรงกระบอกที่ประกอบไปด้วยลานนวดข้าว 23 กริดแยก 9 ตัวนำขดลวดติดตั้งตลอดความยาวของปลอกหน้าต่างทางเข้าและทางออก
มวลขนมปังถูกป้อนโดยสายพานลำเลียง 4 เข้าสู่ส่วนรับ A ของโรเตอร์ 24 จับด้วยใบพัด 26 และป้อนเข้ากับแส้ 22 ซึ่งตี spikelets บีบเมล็ดข้าวและนำมวลเข้าสู่การหมุน มวลที่กระทบกับตัวกั้นสกรูเคลื่อนที่ไปตามเส้นทางขดลวดจากทางเข้าไปยังทางออก เมล็ดพืชและสิ่งสกปรกขนาดเล็กผ่านช่องตะแกรง 23 และตะแกรง 9 เข้าสู่สว่าน 21 และป้อนเข้าสู่ตะแกรงทำความสะอาดด้านบน 17 ขั้นตอนการทำความสะอาดจะคล้ายกับเครื่องผสม Don-1500
เมล็ดข้าวที่ผ่านการทำความสะอาดจะเข้าสู่สว่าน 19 จากนั้นไปยังลิฟต์ 8 และบรรจุลงในถัง 6 ฟางที่ออกมาจากปลอกโรเตอร์จะถูกจับโดยเครื่องตี 10 และป้อนเข้าเครื่องบด 14. แกลบที่มาจากส่วนขยายการทำความสะอาด 75 เข้าสู่สว่าน 14 จากนั้น เข้าไปในปลอกพัดลมจากนั้นใส่ฟางลงในรถเข็นที่แนบมาพร้อมกัน
ผู้เก็บเกี่ยวสามารถวางฟางจากพื้นเป็นแนวราบหรือกระจายไปทั่วสนาม
การรวม“ Don-2600” นั้นติดตั้งอุปกรณ์นวดแยกตามแนวแกนโรเตอร์ มันแตกต่างจาก SK-10 ในการออกแบบไดรฟ์ของโรเตอร์การทำความสะอาดและอุปกรณ์สำหรับรวบรวมกองเมล็ดพืชขนาดเล็กและป้อนเพื่อทำความสะอาด Don-2600 มีสายพานลำเลียงเพิ่มเติมสำหรับป้อนฟางลงในรถ stacker แทนรถ stacker ที่ถอดออกคุณสามารถติดสับและเครื่องดูดควันสำหรับวางฟางลงในแนวขวาง
รถเกี่ยวข้าวรุ่น PN-100 "พรอสเตอร์" ได้รับการออกแบบมาสำหรับการเก็บเกี่ยวเมล็ดพืชและพืชอื่น ๆ ในพื้นที่ตื้น รวมกับรถแทรกเตอร์ ระดับแรงดึง 1, 4 และ 2 เครื่องเกี่ยวนวดมีอุปกรณ์นวดและแยกแกนโรเตอร์ซึ่งแกนตั้งอยู่ขวางกับทิศทางการเคลื่อนที่ของเครื่องเกี่ยวข้าวขนานกับอุปกรณ์ตัด
เส้นผ่านศูนย์กลางใบพัด 570 มม. ยาว 1870 มม. มวลของขนมปังถูกป้อนโดยสายพานลำเลียงในห้องป้อนแบบสัมผัส (ทั่วแกนดรัม) สัมผัสกับผิวดรัม ตรงกันข้ามกับเครื่องผสม SK-10 มวลเกรนในเครื่องผสม PN-100 จะเสียรูปน้อยกว่าและการบดเมล็ดพืชและการใช้พลังงานเฉพาะจะลดลง รถเกี่ยวฟางวางฟางเป็นแนวและแกลบวางไว้ด้านบน
คุณภาพของรถเกี่ยวนวดข้าวได้รับการประเมินจากระดับการสูญเสียเมล็ดข้าวที่อยู่ด้านหลังส่วนหัวและเครื่องนวดข้าวความสะอาดและการบดเมล็ดข้าวที่เก็บในบังเกอร์ คุณภาพขึ้นอยู่กับปัจจัยหลายประการ: ระดับเทคนิคของโซลูชันการออกแบบที่นำมาใช้ในการผสมผสานสถานะและการปรับโครงสร้างการทำงานของส่วนหัวและส่วนนวดที่ถูกต้องปริมาณเมล็ดพืชองค์ประกอบและสภาพการปนเปื้อนและการพักอาศัยของพืชพื้นผิวที่ปรับระดับและภูมิประเทศของสนามทิศทางที่เลือกและความเร็วในการเคลื่อนที่ ทักษะและวินัยทางเทคโนโลยีของผู้ปฏิบัติงาน ระดับทางเทคนิคของเครื่องเก็บเกี่ยวได้รับการประเมินโดยตัวบ่งชี้ซึ่งเป็นค่าที่กำหนดไว้ในตาราง VIII 1.
ปริมาณงาน (กก. / วินาที) ของเครื่องนวดข้าวคือจำนวนมวลเกรนสูงสุดที่สามารถประมวลผลได้โดยการผสมใน 1 วินาทีตามข้อกำหนดทางการเกษตร
ปริมาณงานที่ระบุจะถูกกำหนดเมื่อการทดสอบรวมกันสำหรับการเก็บเกี่ยวข้าวสาลีแบบตั้งตรงมีความยาวลำต้น 0.7-0.9 เมตรผลผลิตอย่างน้อย 4 ตัน / เฮกแตร์ความชื้นของเมล็ดพืชและฟาง 15-18% อัตราส่วนของน้ำหนักเมล็ดต่อน้ำหนักฟาง 1: 1 , 5, การปนเปื้อนในเขตตัดไม่เกิน 5% และน้ำหนัก 1,000 เม็ดมากกว่า 40 กรัม
ผลผลิตของเครื่องเก็บเกี่ยวจะพิจารณาจากการนวดข้าว (t / h) หรือพื้นที่เพาะปลูกที่เก็บเกี่ยวได้ใน 1 ชั่วโมงความสามารถในการนวดข้าวที่ระบุของเครื่องผสมแสดงไว้ในตาราง VIII 1 กำหนดเมื่อทดสอบภายใต้เงื่อนไขเดียวกับความจุเล็กน้อย
คุณภาพของการทำงานของเครื่องเกี่ยวนวดข้าวสามารถพิจารณาได้จากมุมมองทางเทคนิคและทางเทคโนโลยี จากมุมมองทางเทคนิคตัวบ่งชี้คุณภาพการทำงานของเครื่องเก็บเกี่ยวเมล็ดพืชอาจรวมถึงตัวบ่งชี้ความน่าเชื่อถือ (ความน่าเชื่อถือความทนทานความสามารถในการบำรุงรักษาและการถนอมอาหาร) และจากมุมมองทางเทคโนโลยีการสูญเสียเมล็ดพืช (ทางตรงและทางอ้อม) ในทั้งสองกรณีเพื่อประเมินคุณภาพการทำงานของเครื่องเกี่ยวนวดข้าวจำเป็นต้องกำหนดระดับของการปฏิบัติตามตัวบ่งชี้ที่ศึกษากับความต้องการของผู้บริโภค ข้อกำหนดเหล่านี้วางไว้ในการออกแบบระหว่างการวิจัยและพัฒนาซึ่งมีให้ในระหว่างกระบวนการผลิตและแสดงให้เห็นในระหว่างการดำเนินการ รูปที่ 1 แสดงโครงร่างทั่วไปสำหรับการสร้างคุณภาพเล็กน้อยของการทำงานของเครื่องเกี่ยวนวดข้าวจากมุมมองทางเทคนิค มาตรฐานทั้งหมดที่ควบคุมคุณภาพการทำงานของเครื่องเกี่ยวนวดข้าวถูกกำหนดไว้สำหรับเงื่อนไขมาตรฐาน (พื้นฐาน) และปรับให้เหมาะกับผู้อื่น ในเรื่องนี้การให้คะแนนคุณภาพจากมุมมองทางเทคนิคสามารถทำได้โดยใช้เวลาในการทำงานที่แตกต่างกันของเครื่องเกี่ยวนวดข้าวและด้วยการบำรุงรักษาและการซ่อมแซมที่มีคุณภาพสูงรวมถึงสภาพการใช้งานที่ดีจึงสามารถทำได้โดยใช้เวลาในการทำงานที่มากขึ้น
การทบทวนวรรณกรรมทางวิทยาศาสตร์และประสบการณ์การวิจัยพบว่าขอแนะนำให้ประเมินคุณภาพการทำงานของเครื่องเก็บเกี่ยวเมล็ดพืชใน 3 ระดับวิธีการ (รูปที่ 2):
ห้องปฏิบัติการเศรษฐกิจและภูมิภาค ระดับระเบียบวิธีแรกครอบคลุมถึงวิธีการและเทคนิคในการวิจัยเครื่องเก็บเกี่ยวเมล็ดพืชและระบบต่างๆ ในระดับนี้จะคำนึงถึงพารามิเตอร์การออกแบบของเครื่องจักรตำแหน่งสัมพัทธ์ลักษณะวัสดุ ฯลฯ อิทธิพลของสิ่งแวดล้อมที่มีต่อผลการวิจัยไม่ได้ถูกนำมาพิจารณา ระดับนี้เป็นระดับประถมศึกษา ข้อกำหนดเบื้องต้นทางทฤษฎีในระดับนี้ได้รับการพัฒนาอย่างละเอียดในหลักสูตรทางทฤษฎีเกี่ยวกับความแข็งแรงของวัสดุกลศาสตร์เชิงทฤษฎีชิ้นส่วนเครื่องจักร ฯลฯ มีวัสดุทดลองจำนวนมาก
เราเรียกระดับระเบียบวิธีแรกว่า "ห้องปฏิบัติการ" แต่ไม่ได้หมายความว่าการวิจัยทั้งหมดในระดับนี้ควรดำเนินการในสภาพแวดล้อมในห้องปฏิบัติการ ตัวอย่างเช่นการศึกษาการสูญเสียเมล็ดพืชโดยตรงโดยเครื่องเกี่ยวนวดจะดำเนินการในภาคสนาม เป้าหมายของการวิจัยในระดับแรกคือการแยกกัน เก็บเกี่ยวร่วมกัน หรือระบบของเขา จากผลการศึกษาคุณภาพของรถเกี่ยวนวดข้าวในระดับแรกสามารถแนะนำให้มีการเปลี่ยนแปลงในการออกแบบหรือวัสดุซึ่งจะนำไปสู่การเปลี่ยนแปลงคุณสมบัติของเครื่องจักรซึ่งจะส่งผลต่อตัวบ่งชี้คุณภาพระหว่างการทำงาน ในระดับแรกเป็นไปได้ที่จะทำนายหรือประเมินตัวบ่งชี้คุณภาพของเครื่องเกี่ยวนวดข้าวในทางทฤษฎีโดยปกติจะเป็นทางเทคนิค
วัตถุประสงค์ของการวิจัยในระดับวิธีการที่สองขึ้นอยู่กับวัตถุประสงค์และวัตถุประสงค์ของการวิจัยคือกระบวนการเก็บเกี่ยวพืชพันธุ์ธัญญาหารหรือเครื่องเกี่ยวนวดแบบผสมผสานที่ใช้ในสภาวะเศรษฐกิจบางอย่าง โดยปกติวัตถุประสงค์ของการทำความสะอาดจะมีการกำหนดรูปแบบและเทคโนโลยีไว้อย่างชัดเจน มีการสร้างการเชื่อมต่อที่ค่อนข้างเสถียรระหว่างองค์ประกอบของระบบซึ่งมีจำนวนน้อย ในระดับวิธีการนี้เมื่อประเมินคุณภาพการทำงานของเครื่องเก็บเกี่ยวเมล็ดพืชจะมีการใช้ลักษณะสภาพแวดล้อมภายนอกที่ค่อนข้างคงที่และสามารถนำมาพิจารณาในสถานที่ทางทฤษฎีได้ กระบวนการนี้ถูกควบคุมโดยคนหลายคนที่มีเป้าหมายเดียวกัน ในการบริการบำรุงรักษาและซ่อมแซมบริการภายในประเทศและทางวัฒนธรรมในการผสมผสานและ ยานพาหนะ ดังนั้นคนงานจึงมีการฝึกอาชีพและแรงจูงใจทางเศรษฐกิจและสังคมเกือบเหมือนกัน ก็เป็นไปตามนั้น งานทางวิทยาศาสตร์ ระดับวิธีการที่สองไม่ได้คำนึงถึงปัจจัยของมนุษย์ มีการศึกษาทางวิทยาศาสตร์มากมายเกี่ยวกับคุณภาพของงานและความน่าเชื่อถือของรถเกี่ยวนวดข้าวสำหรับสภาพการทำงานเฉพาะโดยใช้ทฤษฎีสถิติทางคณิตศาสตร์เป็นหลัก เนื่องจากการประเมินคุณภาพการทำงานของเครื่องเก็บเกี่ยวเมล็ดพืชในระดับวิธีการที่สองนั้นดำเนินการในสภาพของฟาร์มเฉพาะระดับนี้จึงเรียกว่า "เศรษฐกิจ"
ในระดับระเบียบวิธีที่สามควรดำเนินการวิจัยในภูมิภาคที่ผลิตธัญพืชหนึ่งแห่งของประเทศ (เขตแดนดินแดนหรือสาธารณรัฐ) ซึ่งรวมถึงฟาร์มบางแห่ง การจัดการฟาร์มมักจะแตกต่างกันในหลาย ๆ กรณีสภาพภูมิอากาศของดินและเงื่อนไขอื่น ๆ รวมทั้งแรงจูงใจทางเศรษฐกิจและสังคมแตกต่างกัน การใช้เทคโนโลยีนี้หรือเทคโนโลยีนั้นรูปแบบของการทำความสะอาดขึ้นอยู่กับผู้ที่ตัดสินใจ กระบวนการวิจัยในระดับนี้มีระบบลำดับชั้นที่ซับซ้อนซึ่งประกอบด้วยระบบย่อย - ระบบของระดับที่สอง การเชื่อมโยงระหว่างระบบย่อยไม่เสถียร คำนึงถึงปัจจัยของระดับที่สามเป็นเรื่องยากมาก
ในเรื่องนี้ในขั้นตอนนี้มีการกำหนดบทบาทพิเศษให้กับวิธีการของทฤษฎีทางคณิตศาสตร์ของการวิจัยการดำเนินงานโดยมีสมมติฐานของการเปลี่ยนแปลงในตัวบ่งชี้คุณภาพของการทำงานของเครื่องเก็บเกี่ยวข้าวขึ้นอยู่กับปัจจัยส่วนตัวของผู้ตัดสินใจ เป้าหมายของการวิจัยเหมือนกับในระดับที่สอง ในระดับนี้จำเป็นต้องกำหนดตัวบ่งชี้คุณภาพการทำงานของเครื่องเก็บเกี่ยวเมล็ดพืชในพื้นที่ปลูกข้าวส่วนใหญ่ของประเทศ ระดับที่สามเรียกว่า "ภูมิภาค" จากที่กล่าวมาสิ่งสำคัญและสำคัญที่สุดสำหรับการศึกษาคุณภาพการทำงานของรถเกี่ยวนวดข้าวคือระดับ "ภูมิภาค" ซึ่งคำนึงถึงเครื่องจักรคนและสิ่งแวดล้อม ระดับนี้เป็นแนวทางที่เป็นระบบในการวิเคราะห์และประเมินตัวบ่งชี้คุณภาพของการทำงานของเครื่องเกี่ยวนวดข้าว การดำเนินงานในระดับวิธีการ "ภูมิภาค" ประกอบด้วย: เหตุผลและการเลือกภูมิภาคที่จะดำเนินการวิจัยการประเมินความเป็นไปได้ในการได้รับข้อมูลที่เชื่อถือได้และครบถ้วนสมมติฐานเกี่ยวกับอิทธิพลของพฤติกรรมของผู้มีอำนาจตัดสินใจต่อคุณภาพการทำงานของรถเกี่ยวนวดข้าวการกำหนดข้อ จำกัด ของปัจจัยที่สันนิษฐาน ซึ่งตัวบ่งชี้คุณภาพที่พิจารณาขึ้นอยู่การเลือกตัวบ่งชี้คุณภาพของการทำงานของเครื่องเกี่ยวนวดข้าวการยืนยันการทำงานของผลลัพธ์ที่แท้จริงตามที่ต้องการ (จำเป็น) การเลือกวิธีการวิจัยการรวบรวมข้อมูลการสร้างแบบจำลองการคำนวณและการระบุผลกระทบจากปัจจัยที่เลือกการประเมินตัวบ่งชี้คุณภาพของการทำงานของเครื่องเกี่ยวนวดข้าวการเปรียบเทียบตัวบ่งชี้คุณภาพ การทำงานของรถเกี่ยวนวดข้าวตามที่ต้องการ (จำเป็น)
ขั้นตอนต่อไปของวิธีการในการประเมินคุณภาพการทำงานของรถเกี่ยวนวดข้าวคือการสร้างแบบจำลองของกระบวนการที่อยู่ระหว่างการพิจารณา ตามกฎแล้วการสร้างแบบจำลองประกอบด้วยสองขั้นตอน: การพัฒนา (การสร้าง) ของแบบจำลอง (ทางคณิตศาสตร์หรือทางกายภาพ); การวิเคราะห์แบบจำลอง (การสร้างแบบจำลองทางคณิตศาสตร์หรือการทดลอง) ยิ่งไปกว่านั้นในทั้งสองขั้นตอนคุณสามารถปรับแต่งโมเดลได้ จากผลการจำลองจะมีการตัดสินใจปรับปรุง ขั้นตอนการเก็บเกี่ยวเมล็ดพืชหรือการออกแบบเครื่องเกี่ยวนวดข้าวตามแผนภาพโครงสร้างต่อไปนี้ (รูปที่ 3)
ตัวบ่งชี้คุณภาพของการทำงานของเครื่องเกี่ยวนวดจะแสดงให้เห็นตามผลของการทำงานในสภาพการใช้งานจริง
เนื่องจากความจริงที่ว่าเมื่อมีการตัดสินใจที่จะปรับปรุงกระบวนการเก็บเกี่ยวพืชพันธุ์ธัญญาหารหรือการออกแบบเครื่องเกี่ยวนวดแบบผสมผสานจึงต้องคำนึงถึงปัจจัยด้านเครื่องจักรสิ่งแวดล้อมและมนุษย์ที่มีผลต่อคุณภาพการทำงานของเครื่องเกี่ยวนวดข้าวดังนั้นเพื่อให้ได้ค่าของปัจจัยทั้งสามกลุ่มจึงจำเป็นต้องมีแหล่งข้อมูล แหล่งข้อมูลอาจเป็นวัสดุทางสถิติเกี่ยวกับกิจกรรมของวิสาหกิจการเกษตรและพื้นที่เพาะเมล็ดพืชโดยทั่วไปข้อมูลจากบริการด้านอุตุนิยมวิทยาและบริการอื่น ๆ ผลของระยะเวลาที่ต่อเนื่องและเลือกได้ของการทำงานของเครื่องเกี่ยวนวดข้าวและการศึกษาทดลอง ในกรณีนี้คุณสามารถใช้วิธีการต่างๆในการกำหนดตัวบ่งชี้คุณภาพ: การวัดการลงทะเบียนทางประสาทสัมผัสการคำนวณผู้เชี่ยวชาญทางสถิติ จากการวิเคราะห์ข้อมูลที่เป็นไปได้จะสังเกตได้ว่าก่อนที่จะเริ่มการเก็บเกี่ยวเมล็ดพืชบางชนิดเป็นที่รู้จัก ซึ่งรวมถึงผลผลิตของเมล็ดพืชอัตราส่วนของน้ำหนักเมล็ดพืชต่อน้ำหนักฟางปริมาณความชื้นของเมล็ดพืชและฟางการกำจัดวัชพืชอัตราส่วนของพื้นที่หว่านสำหรับเมล็ดพืชและพันธุ์ต่างๆยี่ห้อของรถเกี่ยวนวดข้าวที่ใช้ในการเก็บเกี่ยวและอายุการใช้งานเป็นต้นอื่น ๆ ข้อมูลข้อมูลบางส่วนไม่ได้กำหนดไว้ ข้อมูลนี้สามารถสุ่มโดยมีการแจกแจงที่ทราบหรือไม่ทราบหรือไม่อยู่ในลักษณะสุ่ม
รายชื่อวรรณกรรมที่ใช้
เก็บเกี่ยวร่วมกัน
1. ความน่าเชื่อถือและประสิทธิภาพของเทคโนโลยี: หนังสืออ้างอิง: ใน 10 เล่ม / Ed. คำแนะนำ: V.S. Abduevsky (ก่อนหน้า) ฯลฯ T. 7. คุณภาพและความน่าเชื่อถือในการผลิต / ต่ำกว่าทั้งหมด เอ็ด I.V. Apolonov - M .: Mashinostroenie, 1989 .-- 280 p.
ความน่าเชื่อถือและประสิทธิภาพของเทคโนโลยี: หนังสืออ้างอิง: ใน 10 เล่ม / Ed. คำแนะนำ:
V.S. Abduevsky (ก่อนหน้า) และอื่น ๆ T. 3. ประสิทธิผลของระบบเทคนิค / ภายใต้ทั่วไป. เอ็ด วี. เอฟ. Utkina, Yu.V. Kryuchkova - M .: วิศวกรรมเครื่องกล, 1986. - 328s.
Khalansky V.M. , Gorbachev I.V. "เครื่องจักรทางการเกษตรอุปกรณ์ทางวัฒนธรรม" - M .: KolosS, 2004. - 624 p: ป่วย - (หนังสือเรียนและหนังสือเรียนสำหรับนักศึกษาสถาบันอุดมศึกษา) ISBN 5-9532-0029-3
สั่งงาน
ผู้เชี่ยวชาญของเราจะช่วยคุณเขียนงานด้วยการตรวจสอบความไม่ซ้ำใครในระบบ "Antiplagiat"
ส่งคำขอ ด้วยข้อกำหนดในขณะนี้เพื่อค้นหาค่าใช้จ่ายและความเป็นไปได้ในการเขียน
