ՌՈՏԱՐԻ ԷՔՍԿԱՎԱՏՈՐ (а. Շերեփի անիվի էքսկավատոր; n. Schaufelradbagger; զ. Excavateur а roue, roue-pelle; և. Excavadora de rotor) - ինքնաշարժ մեքենա շարունակական գործողություն թրթուրի կամ երկաթուղային գծի վրա ՝ հետ քաշվող կամ ոչ հեռադիտակային բումով, որը նախատեսված է վերին (հիմնականում) և ստորին փորման, պեղումների (ալիքների) ծանրաբեռնվածության կամ հանքարդյունաբերության համար փոխադրամիջոց... Այն օգտագործվում է ցածր և միջին ուժի ապարների և ածուխների վրա (մինչև IV կատեգորիա ներառյալ առանց պայթյունի նախնական թուլացման, իսկ ավելի կոշտ ՝ թուլացումից հետո) 40-35 ° С ջերմաստիճանում:
Դույլերով պտտվող գործադիր մարմինը ուներ նախնիների ջրամբարձ անիվների նախատիպ: Փորող անիվի գաղափարը առաջին անգամ արտահայտեց Լեոնարդո դա Վինչին (16-րդ դարի սկիզբ): 1884 թվականին ամերիկացի ինժեները արտոնագիր ստացավ էքսկավատորի համար ՝ 2 ռոտորային անիվներով, որոնք տեղակայված էին փոխակրիչի համեմատաբար սիմետրիկորեն: Շերեփային անիվի առաջին էքսկավատորը արտադրվել է Գերմանիայում 1916 թվականին «Հումբոլդտ» ընկերության կողմից ֆրանսիացի ինժեներ Գ. Շվանդերի արտոնագրով: Դրանք լայնորեն կիրառվել են Գերմանիայում ածխահանքերում: Առաջին դույլ անիվի էքսկավատորները ստեղծվել են Չասով-Յարսկի հրակայուն հումքի քարհանքերի արհեստանոցներում 50-ականներին, և դրանց արդյունաբերական արտադրությունը սկսվել է 1958-ին (ERG-350/1000 մոդելը, որը կառուցվել է Դոնեցկի LKSMU- ի անվան մեքենաշինական գործարանում `Նովոկրամատորսկի մեքենաշինական գործարանի հետ համատեղ ծրագրի շրջանակներում Վ. Ի. Լենինի անունով): 1967 թ.-ին NKMZ- ն արտադրեց հզոր դույլ անիվի էքսկավատոր ERG-1600` 3000 մ 3 / ժամ տարողությամբ հեռադիտակային բումով, իսկ 1973 թ.` ERSHRD-5000` քայլող երկաթուղու վրա: Արտադրության համար պատրաստվում են 12,500 մ 3 / ժ հզորությամբ պտտվող էքսկավատորներ (ERSHRD-12500 NKMZ-KRASTYAZHMASH): Սովետական \u200b\u200bդույլերի էքսկավատորների պարամետրերը տրված են աղյուսակում:
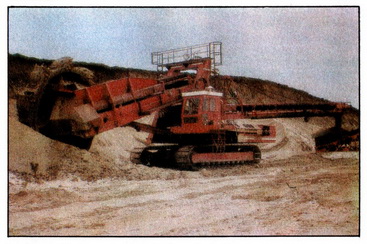
Շերեփային անիվի էքսկավատորը պեղում է ժայռի զանգվածը ռոտորի անիվի վրա տեղադրված դույլերով, որոնք պտտվում են իր առանցքի շուրջ մի ուղղությամբ, որն ապահովում է դրանց արդյունավետ լրացումը ներքևի մասի հետ շփման գոտում (վերին փորվածքով `ժամացույցի սլաքի ուղղությամբ, եթե ռոտորին նայեք ձախ« այտոսկրից », և դեմ ՝ ներքևի փորման հետ, դույլերով 180 ° -ով տեղաշարժով): Գործողության ընթացքում դույլի անիվի էքսկավատորի գործադիր մարմինը շարժվում է հորիզոնական և ուղղահայաց հարթությունում: Ռոտորը սնվում է դեմքին կամ ռոտորի բումը երկարացնելով, կամ ամբողջ մեքենան առաջ շարժելով ենթակառուցվածքի վրա:
 Տեխնոլոգիական տեսանկյունից, ճառագայթային և լայնակի փորման դույլային էքսկավատորներն առանձնանում են իրենց նպատակներով, առավելագույն տեսական արտադրողականությամբ, MPa- ում հաշվարկված հատուկ փորման ուժի արժեքով, ռոտորին հատակին կերակրելու եղանակով, աշխատանքային հորիզոնի թույլատրելի թեքության արժեքով, որը որոշվում է պտտաձողը հավասարեցնող սարքի առկայությամբ կամ բացակայությամբ, բեռնաթափման փոխակրիչ, ճանապարհորդական սարքի տեսակը: Դույլերը բեռնաթափելու մեթոդի համաձայն, ռոտորները սովորաբար բաժանվում են գրավիտացիոն և իներցիալների: Նախկինում շերեփները բեռնաթափվում են ժայռի ծանրության գործողության ներքո, երբ անցնում են բեռնաթափման գոտին ռոտորի վերին մասում: Իներցիոն ռոտորներով դույլերը բեռնաթափվում են կենտրոնախույս ուժերի կողմից, որոնք դույլերից ժայռ են նետում: Դա անելու համար ռոտորի արագությունը տրամադրվում է գրավիտացիոնից 3-5 անգամ ավելի բարձր, և հասնում է ժայռի զանգվածի մասնիկների շարժման արագությունը, որի վրա նրա վրա գործող կենտրոնախույս ուժը գերազանցում է ձգողականության ուժը և այդ պատճառով ժայռը դուրս է շպրտում դույլից: Դույլերից ժայռի զանգվածը բեռնաթափվում է ռոտորի կողքին կամ հետևում գտնվող փոխակրիչի վրա, այնուհետև փոխանցվում է բեռնաթափման (թափման) փոխակրիչին ուղղակիորեն կամ փոխակրիչների վերալիցքավորման համակարգի միջոցով:
Տեխնոլոգիական տեսանկյունից, ճառագայթային և լայնակի փորման դույլային էքսկավատորներն առանձնանում են իրենց նպատակներով, առավելագույն տեսական արտադրողականությամբ, MPa- ում հաշվարկված հատուկ փորման ուժի արժեքով, ռոտորին հատակին կերակրելու եղանակով, աշխատանքային հորիզոնի թույլատրելի թեքության արժեքով, որը որոշվում է պտտաձողը հավասարեցնող սարքի առկայությամբ կամ բացակայությամբ, բեռնաթափման փոխակրիչ, ճանապարհորդական սարքի տեսակը: Դույլերը բեռնաթափելու մեթոդի համաձայն, ռոտորները սովորաբար բաժանվում են գրավիտացիոն և իներցիալների: Նախկինում շերեփները բեռնաթափվում են ժայռի ծանրության գործողության ներքո, երբ անցնում են բեռնաթափման գոտին ռոտորի վերին մասում: Իներցիոն ռոտորներով դույլերը բեռնաթափվում են կենտրոնախույս ուժերի կողմից, որոնք դույլերից ժայռ են նետում: Դա անելու համար ռոտորի արագությունը տրամադրվում է գրավիտացիոնից 3-5 անգամ ավելի բարձր, և հասնում է ժայռի զանգվածի մասնիկների շարժման արագությունը, որի վրա նրա վրա գործող կենտրոնախույս ուժը գերազանցում է ձգողականության ուժը և այդ պատճառով ժայռը դուրս է շպրտում դույլից: Դույլերից ժայռի զանգվածը բեռնաթափվում է ռոտորի կողքին կամ հետևում գտնվող փոխակրիչի վրա, այնուհետև փոխանցվում է բեռնաթափման (թափման) փոխակրիչին ուղղակիորեն կամ փոխակրիչների վերալիցքավորման համակարգի միջոցով:
Ռոտորի և կաղապարի բումերի բարձրացումն ու իջեցումն իրականացվում է շղթայական վերելակների շղթայի միջոցով ՝ հակակշռող բումի վրա տեղադրված մոմերով: Վերջինս, ռոտորային բումի աջակցության կայանի և սահուն հարթակի հետ միասին, կազմում են դույլի անիվի էքսկավատորի վերին կառուցվածքը (վերնաշենքը): Գերաշենքի պլատֆորմը ապահովվում է շասսի հիմքի վրա գտնվող ճարմանդային օղակի միջոցով և դրա համեմատությամբ կարող է պտտվել 360 ° -ով: Աղբատար փոխադրիչն ունի անհատական \u200b\u200bճոճանակային շարժիչ, որը թույլ է տալիս դրա բումը երկկողմանի առանցքից շեղվել 270 ° -ով երկու ուղղությամբ և պահպանել տվյալ դիրքը տարածության մեջ ՝ անկախ ռոտորի բումի գտնվելու վայրից:
CCCP- ն արտադրում է կարիերայի նշաններ ER (5 տեսակ) 630, 1250, 2500, 5000, 10,000 մ 3 / ժամ տարողությամբ չամրացված զանգվածի և առնվազն 0.7 ՄՊա-ի հատուկ փորման ուժի և նույն 5 տեսակի պտտվող էքսկավատորների `առնվազն փորող ուժով փորելու հատուկ գործողության համար 1.4 MPa (ERP էքսկավատորներ), որոնք նախատեսված են հանքարդյունաբերական գործունեության համար:
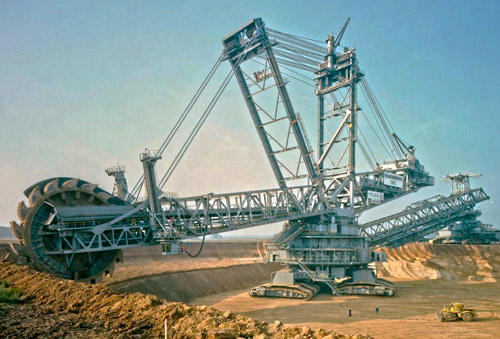
Շերեփային անիվների էքսկավատորների ամենահզոր օտարերկրյա մոդելներն են SchRs-6340.51 / 17 (Գերմանիա) և SRs-6300 (GDR) տրանսպորտային միջոցները, որոնց ընդհանուր հաշվարկով օրեկան թողարկվում է մինչև 240 հազար մ 3: Առաջին մոդելում 70,5 մ երկարությամբ բումը թույլ է տալիս մշակել 51 մ բարձրությամբ և 17 մ խորությամբ նստարան: Ռոտորն ունի 21,5 մ տրամագիծ և 18 դույլ `յուրաքանչյուրը 6,34 մ 3 տարողությամբ: Նախագծված արտադրողականություն 19 120 մ 3 / ժամ: Չորս ռոտորային շարժիչի հզորությունը 3360 կՎտ է, դույլի անիվի էքսկավատորի քաշը `ինքնավար բեռնիչ սարքով և միացնող կամրջով` 12 800 տոննա:
Շերեփային անիվի էքսկավատորի զարգացումը հետևում է բարձր արտադրողականության մեքենաներ և մոդելներ `ավելացված հատուկ փորման ուժով (2.1-3 ՄՊա) և կրճատված գծային պարամետրերով (կոմպակտ դույլ անիվի էքսկավատորներ):
Հատուկ սարքավորումների շուկայում առկա բոլոր էքսկավատորները բաժանվում են մեկ դույլի և բազմաշեր մոդելների: Առաջինը հիմնականում օգտագործվում է շինհրապարակներում: Դրանք վերաբերում են մեկ ցիկլի մեքենաներին, այսինքն ՝ կատարում են որոշակի աշխատանք ժամանակի միավորի համար:
Վերջիններս օգտագործվում են լեռնահանքային արդյունաբերության մեջ, օգտակար հանածոների մշակում, քարհանքերից ավազի զարգացում: Դրանք պատկանում են շարունակական շահագործման տեխնիկային, համապատասխանաբար, ունեն ավելի մեծ արտադրողականություն, համեմատած մեկ դույլ մոդելների հետ: Շարունակական հողային սարքավորումները բաժանված են պտտվող և շղթայական մեքենաների: Հաշվի առեք դույլի անիվի էքսկավատորը:
Դիզայնի առանձնահատկությունները
Պտտվող մեքենաները տարբերվում են շասսի նախագծման մեջ: Մասնավորապես, մոդելներն արտադրվում են հետքերով կամ հետիոտնային հետքերով: Սարքավորումների բարձր կատարումը միակ առավելությունը չէ պտտվող մեքենաներ... Շարունակական աշխատանքային ցիկլը սարքավորումների շահագործումը ֆինանսական առումով ավելի շահավետ է դարձնում: Պետք է նշել, որ դույլերի լավագույն դատարկումը և պեղված հողի կորստի նվազագույն քանակը:
Քննարկվող մոդելներում դույլերը տեղակայված են մեծ անիվի վրա (ռոտոր): Սա ապահովում է, որ հողը աշխատի օպտիմալ ուղղությամբ: Եթե \u200b\u200bմակերեսային շերտ է առաջանում, ռոտորը պտտվում է ժամացույցի սլաքի ուղղությամբ: Ստորին շերտի հետ աշխատելիս ռոտացիան հակառակ ուղղությամբ է: Բացի այդ, դույլերը կարող են պտտվել ուղղահայաց կամ հորիզոնական: 
Հողի դույլերը դույլերն իրականացվում են ըստ ստանդարտ սխեմայի, սակայն տարաների դատարկումը կատարվում է հետևյալ սկզբունքների համաձայն. Իներցիա կամ ինքնահոս: Առաջին դեպքում կենտրոնախույս ուժը գործում է դույլի ժայռի վրա ՝ հողը շպրտելով բաքից: Ձգողական մեթոդով բեռնաթափումը տեղի է ունենում արտադրության սեփական քաշի հաշվին:
Պտտվող էքսկավատորները կարող են գործել ցանկացած կլիմայական պայմաններում: Միևնույն ժամանակ, մեքենաների աշխատանքը տեղի է ունենում առանց ավելորդ ծախսերի և արտադրողականության կորստի:
Տեխնիկական բնութագրեր
Ռոտորը տեղակայված է հեռադիտակային կամ ստացիոնար բումի վրա: Տիեզերքում բումի դիրքի փոփոխությունը պայմանավորված է ճախարակով, որի մալուխն անցնում է շղթայի ամբարձիչի կայմով: Բումի դիրքը ճշգրտվում է տեղադրված հակակշիռների միջոցով:
Պետք է նշել, որ էքսկավատորի այս տեսակն ունի երկու տեսակի բում `ձուլվածք և պտտվող: Յուրաքանչյուր կառույց ունի նույն բարձրացման և իջեցման սխեման: Միասին սա կազմում է էքսկավատորի վերնաշենք, որն իր առանցքի շուրջ պտտվում է 360 աստիճանով: 
Յուրաքանչյուր մոդել հագեցած է արտանետման տարայով: Պետք է նշել, որ այս հանգույցն ունի ինքնավար շրջադարձային համակարգ: Այս պայմանավորվածությունը հորիզոնական հարթության համեմատ ապահովում է բումի 270-300 աստիճանի շեղում: Ռոտորի միջին չափը մոտ 20 մետր տրամագիծ է: Շերեփի ծավալը մոտ 12 լիտր է, զարգացման խորությունը կարող է հասնել 20-25 մետրի, մինչդեռ պեղումների բարձրությունը 50 մետր է:
Այդպիսի բնութագրերը, մեքենան տրամադրել ժամում մինչև 10,000 խորանարդ մետր հզորությամբ:
Սորտեր
Բազմաշերեփ մեքենաները որակավորված են իրենց նպատակային նպատակների համար: Այսպիսով, կարելի է առանձնացնել խրամուղիների և քարհանքերի մեքենաները:
Քարհանքի էքսկավատոր: Տեխնիկան պատկանում է շարունակական բազմադույլ մեքենաներին, չնայած կան նաև մեկ շերեփի փոփոխություններ: Այս կատեգորիան բաժանվում է մերկացման և արտադրության մոդելների: Նյութը արդյունահանվում է մակերեսային կամ խորքային փորման միջոցով: Տեխնիկան նախատեսված է հողի զարգացման համար մինչև բարդության 4-րդ կատեգորիա `առանց նախնական թուլացման: Օգտագործվում է ավազահանքերում, հանքարդյունաբերության, ժայռերի արտադրության մեջ:
Հանքարդյունաբերության էքսկավատորները բաղկացած են առանձին միավորներից, որոնք միավորված են մեկ սխեմայի: Մեկ միավորի խափանման դեպքում ամբողջ մեքենան ապամոնտաժելու անհրաժեշտություն չկա, բավական է դաշտում իրականացնել համախառն վերանորոգում:
Խրամուղի էքսկավատոր: Սրանք ավելի լայն կիրառման մեքենաներ են: Դրանք օգտագործվում են խրամատների ձևավորման համար ՝ տարբեր նպատակներով ՝ կոմունալ ծառայությունների, գազի կամ նավթամուղերի համար: Բացի այդ, մեքենաները նախատեսված են ոռոգման ջրանցքների, ջրահեռացման և ջրահեռացման համակարգերի տեղադրման համար: Հարկ է նշել, որ հիմնական դույլերը կարող են փոխարինվել կտրիչով կամ քերիչներով:
Խրամուղիների դույլ անիվի էքսկավատորը կարող է լինել կցորդներ անվավոր տրակտորի համար, կամ լինենք թրթուրավոր ուղու անկախ միավոր: Երկաթուղու վրա աշխատանքներ իրականացնելու համար, օրինակ, պատնեշի ձևավորումը, երկաթուղային հարթակում տեղադրվում է խրամուղի էքսկավատոր: Հիդրավլիկ համակարգը պատասխանատու է ռոտորը բարձրացնելու համար:
Սովորական հողի վրա սարքավորումների արտադրողականությունը կարող է լինել ժամում մոտ 300 խորանարդ մետր, սառեցված հողի համար այս ցուցանիշը նվազում է մոտ տաս անգամ `մինչև 40 խորանարդ մետր ժամանակի միավորի համար:
Հաշվի առնելով վերը նշված առանձնահատկությունները, պտտվող մոդելները մեծ պահանջարկ ունեն տարբեր արտադրական արդյունաբերություններում: Պետք է նշել, որ այս տեսակի սարքավորումները շահագործելու համար պահանջվում է որակյալ անձնակազմ:
ԱՍԵՔ ՁԵՐ ԲԱՐԵԿԱՄՆԵՐԻՆ
Հետադարձ կապի հետ
Հանքանյութերի մշակման և արդյունահանման մեջ, խորը և մակերեսային փորման հետ կապված աշխատանքներում, մերկացման և այլ նմանատիպ աշխատանքների համար, անփոխարինելի տեխնիկական սարք պտտվող էքսկավատոր է: Այս սարքն աշխատում է իր ուղու վրա, որն անընդհատ աշխատանք է կատարում ՝ գործելով թրթուրի ուղու կամ երկաթուղային հարթակի վրա: Գործողության ընթացքում էքսկավատորը օգտագործում է նետ, որը կարող է հետ քաշվել, թե ոչ:
Շերեփային անիվի էքսկավատորների օգտագործումը լայն տարածում ունի և լայնորեն կիրառվում է բազմաթիվ տիպի աշխատանքների համար. Հանքարդյունաբերական աշխատանքներ են կատարում ՝ դույլով փորելով, պեղած ապարները աղբանոցներ են հանում, կարողանում են օգտակար ժայռեր ամբողջ շերտերով հանել, հաճախ օգտագործում են խրամատներ և փոսեր փորելու համար, զբաղվում են ժայռերի բեռնափոխադրմամբ, դրանց փոխադրմամբ: և պահեստավորում: Շերեփային անիվի էքսկավատորը, մյուսների հետ միասին, շատ հաճախ օգտագործվում է ածխահանքերում, ոչ մետաղական նյութերի արդյունահանման և այլ խոշոր լեռնահանքային կայաններում:
Շերեփային անիվի էքսկավատորների կիրառում և շահագործում
Շերեփային անիվի էքսկավատորի շահագործման սկզբունքն այն է, որ դույլերի գործադրմամբ արդյունահանվի ժայռի զանգված, որոնք ամրացված են հենց դույլի անիվի վրա: Հաշվի առնելով այն փաստը, որ նրանք ունեն իրենց սեփական առանցքի շուրջ պտտման հատկություն, դրանք ամբողջությամբ լցված են: Շերեփային անիվի էքսկավատորների կատարումը պակաս արդյունավետ չի դառնում ցանկացած մակարդակի ջերմաստիճանում, այդ հրեշներն ունակ են դիմակայել ցանկացած տեսակի բեռի և շարունակական ֆունկցիոնալության:
Պտտվող էքսկավատորներշարունակական արտադրության շնորհիվ նրանք նաև ունակ են ականապատված ապարները տեղափոխել և բեռնել ցանկացած տեսակի տրանսպորտային միջոցների մեջ:
Դույլի անիվի էքսկավատորի դույլերը կարող են բեռնաթափվել երկու եղանակով: Այն կարող է արտադրվել գրավիտացիոն եղանակով և իներցիոն եղանակով: Ինքնահոս դույլի բեռնաթափման տիպում դա պայմանավորված է ժայռի արտադրած գործող ուժերով, երբ անցնում է ռոտորի վերին մասում գտնվող բեռնաթափման գոտիով:
Եթե \u200b\u200bշերեփի բեռնաթափումն իրականացվում է ըստ իներցիոն տիպի, ապա տեղի է ունենում կենտրոնախույս ուժերի ազդեցություն, որոնք, ազդելով ժայռերի զանգվածի վրա, դուրս են նետում նրանց շերեփից: Այս գործողությանը հասնելու համար ռոտորի անիվի ռոտացիան մոտ հինգ անգամ ավելի մեծ է, քան գրավիտացիոնինը: Ռոք զանգվածների բեռնաթափումը կատարվում է փոխակրիչի վրա, այն գտնվում է էքսկավատորի կողքին, որից հետո դրանք գերբեռնված համակարգի միջոցով սնվում են բեռնաթափման փոխակրիչին:
Դույլ անիվի էքսկավատորի առանձնահատկությունները
Պտտվող բումը և կաղապարային բումը կարող են բարձրացվել և իջեցվել շղթայական ամբարձիչ համակարգի միջոցով ՝ պտուտակների միջոցով, դրանք տեղադրվում են հակակշիռ բումի վրա: Այս կառուցվածքը, հենակետային կայմի և էքսկավատորի առանցքային հարթակի հետ միասին, միասին կազմում են երկրորդ վերնաշենքը, որը գտնվում է ռոտորային սարքի վերևում: Այս վերնաշենքը կարող է իր շուրջ պտտվել 360 աստիճանով ՝ կապված հիմնական սարքի հետ:
Բեռնաթափման համար նախատեսված տարան ունի իր առանձին պտտվող շարժիչը, որը թույլ է տալիս բումը շեղվել երկայնքով տեղակայված առանցքից `270 աստիճանի կարգի երկու կողմերից:
Շերեփային անիվի էքսկավատորների տարբեր մոդելները կարող են շատ տարբերություններ ունենալ նախագծման առանձնահատկությունների մեջ: Դրանք կարող են պարունակել տեղադրված սարքավորումների տարբեր անհատական \u200b\u200bտարրեր: Օրինակ, փոխարկիչ տեղադրելու փոխարեն առանձին պտտվող մոդելի վրա կարող է տեղադրվել գետնանցում:
Պտտվող էքսկավատորները չափազանց արդյունավետ են, դրանք ունակ են շահագործման մեկ ժամվա ընթացքում արտադրել մոտ տասը հազար խորանարդ մետր նյութ: Շերեփի տարողությունը մոտ տասներկու ու կես լիտր է: Նրանք կարող են զարգացում իրականացնել մինչև հիսուն մետր բարձրության վրա և հողը քանդել քսանհինգ մետր խորության վրա: Պտտվող անիվները, որպես կանոն, ունեն միջին տրամագիծը մոտ տասնութ մետր:
մեկ դույլով շինարարական էքսկավատորներ: Դասակարգում: Էքսկավատորներ `աշխատանքային սարքավորումներով` կռունկ, կողոպտում, առջեւի և հետևի թիակներ; քաշել Էքսկավատորներ հիդրավլիկ շարժիչով: Հիդրավլիկ և հիդրոօդային մուրճեր: Մասնակի շրջադարձային հիդրավլիկ ունիվերսալ էքսկավատորներ: Փոքր չափի մինի և միկրո-էքսկավատորներ: Էքսկավատոր-պլանավորող:
ՇԱՐՈՒՆԱԿԱԿԱՆ ՊԱՀԱՈՆԵՐ
Շարունակական էքսկավատորները հողաշարժ մեքենաներ են, որոնք անընդհատ ականազերծում են հողը, այն բեռնելով կամ թափելով: Շարունակական էքսկավատորի աշխատանքային մարմինը հագեցած է մի քանի դույլերով, քերիչներով կամ հատիչներով ՝ հողը զանգվածաբար բաժանելով լեռնազանգվածից: Դրանք ամրագրված են մեկ աշխատանքային մարմնի վրա `ռոտոր կամ փակ միացում, որը տեղադրված է որոշակի հաստատուն քայլով:
Հողը մշակվում է երկու անկախ շարժումների գործընթացում.
հարաբերական - դույլերի կամ աշխատանքային մարմինների կրկնվող անընդհատ շարժում, որոնք փոխարինում են դրանք փակ ճանապարհով ՝ օժանդակ շրջանակի համեմատ և շարժական - աշխատանքային մարմինների հետ միասին տեղափոխելով շրջանակը, որը կոչվում է սնուցում: Հողը թափելու համար օգտագործվում է հատուկ տրանսպորտային սարք `ավելի հաճախ գոտի փոխակրիչ, որին հողը գալիս է դույլերից կամ դրանք փոխարինող աշխատանքային մարմիններից:
Աշխատանքային շարժումների միատարրությունը կանխորոշում է գործընթացի ավտոմատացումը և, որպես հետևանք, հեշտացնում է հսկողությունը, որը հասնում է էքսկավատորի նախնական տեղադրմանը որոշակի ռեժիմի `համաձայն մշակվող հողի տեխնոլոգիական պահանջների և բնութագրերի, վերահսկում է դրա գործողությունն ու գործառնական ձեռնարկի վերահսկումը ծայրահեղ իրավիճակներում, օրինակ` աշխատողին կանգնեցնելը մարմին անհաղթահարելի խոչընդոտի հետ հանդիպելիս `աշխատանքային շարժումների ռեժիմները փոխելու համար և այլն: Ըստ այս ցուցանիշի, շարունակական էքսկավատորներն առավելություն ունեն մեկ դույլով էքսկավատորների նկատմամբ, որոնց աշխատանքային գործընթացի վերահսկումը պահանջում է օպերատորի մշտական \u200b\u200bմասնակցություն պեղումների յուրաքանչյուր ցիկլի ընթացքում: Այս էքսկավատորների երկրորդ կարևոր առավելությունը մեկ դույլով էքսկավատորների նկատմամբ էլեկտրակայանի տեղադրված էներգիայի ժամանակին ավելի լիարժեք օգտագործումն է և, որպես արդյունք, այլ բաների հավասար լինելը, ավելի բարձր տեխնիկական կատարումը:
Դասակարգելշարունակական էքսկավատորներ (նկ. 138) ըստ հետեւյալ հատկանիշների.
Ըստ նշանակման կամ կատարված աշխատանքի տեսակը. խրամատ - խրամատներ փորելու և լրացնելու համար.քարհանք - քարհանքերում շինանյութերի արդյունահանման համար;
շինարարություն և քարհանք - շինարարության մեջ զանգվածային հողային աշխատանքների համար:
Ըստ աշխատանքային մարմնի տեսակի`պտտվող և շղթայական:
Փորելու եղանակովերկայնական, երբ հարաբերական և շարժական շարժումը կատարվում է նույն հարթությունում, և լայնակի փորում - հակառակ դեպքում:
Դասակարգման մնացած առանձնահատկությունները սովորական են շինարարական մեքենաներ (ըստ սկավառակի տեսակի, ճանապարհորդական սարքի և այլն:.).
Խրամուղի էքսկավատորները կոչվում են շարունակական հողային մեքենաներ `երկայնական փորման աշխատանքային մարմնով, որոնք օգտագործվում են խրամատներ փորելու համար - մեծ երկարությամբ պեղումներ` դրանց խաչմերուկների չափերի համեմատ:
Կախված աշխատանքային մարմնի տեսակից `տարբերակում է դրվում պտտվող ևշղթա խրամատների էքսկավատորներ... Դույլի անիվի էքսկավատորում դույլերը տեղադրվում են հավասար քայլով `աշխատանքային մարմնի ծայրամասի երկայնքով` ռոտորով, իսկ շղթայական էքսկավատորներում `դույլի փակ շղթայի վրա: Պտտվող էքսկավատորներն օգտագործվում են սահմանափակ խորության խրամատներ զարգացնելու համար (մինչև 3 մ) այն փաստի պատճառով, որ այս պարամետրի հետագա բարձրացումը պահանջում է ռոտորի տրամագծի և դրա հետ կապված ընդհանուր բարձրության բարձրացում, որի սահմանափակող արժեքները կարգավորվում են էքսկավատորի անվտանգ շարժման պայմաններով, երբ այն տեղափոխվում է կամուրջների, գետնանցումների, էլեկտրահաղորդման գծերի և այլ շինհրապարակում: աշխատանքային մարմինները, երբ դրանք տեղափոխվում են տրանսպորտային դիրքի, տեղակայված են գրեթե հորիզոնական ՝ առանց ընդհանուր բարձրության բարձրացման: Հետեւաբար, շղթայական էքսկավատորները կարող են պեղել ցանկացած գործնական խորության խրամատներ: Ներքին արդյունաբերությունը արտադրում է շղթայական էքսկավատորներ մինչև 6 խրամատներ պեղելու համար մ.
Խրամուղի էքսկավատորները կարող են արդյունավետ օգտագործվել համասեռ հողերի զարգացման համար մինչև IV կատեգորիա ներառյալ: Խոշոր քարքարոտ ներմուծումները նվազեցնում են այդ մեքենաների ռեսուրսը, հանգեցնում հաճախակի խափանումների, անսարքությունների և վերանորոգման և վերականգնման աշխատանքների լրացուցիչ ծախսերի: Հատուկ պտտվող խրամատների էքսկավատորները ունակ են նաև պեղել սառեցված հողերը:
Որպես շարունակական գործողության մեքենա, խրամուղի էքսկավատորը լիովին գիտակցում է իր տեխնոլոգիական հնարավորությունները, երբ զարգացնում է երկար խրամատներ, որոնք ունեն նվազագույն քանակի պիոներ պեղումներ աշխատանքային մարմինը խրամատ մուտք գործելու համար, որոնք սովորաբար ավարտվում են ամբողջական պրոֆիլով `մեկ դույլով էքսկավատորներով:
Խրամուղի էքսկավատորի հիմնական պարամետրը պոկված խրամատի խորությունն է, որը ներառված է դրա ինդեքսում: Օրինակ, ETR-254- ը նշանակում է չորրորդ մոդելի պտտվող խրամատային էքսկավատոր մինչև 2.5 խրամատների զարգացման համար մ; ETTs-165 - 5-րդ մոդելի շղթայական խրամատների էքսկավատոր, խրամատի խորությունը մինչև 1,6 մ... Հիմնական պարամետրերն են էքսկավատորի քաշը և շարժիչի հզորությունը:
Խրամուղի էքսկավատորը բաղկացած է տրակտորից և աշխատանքային սարքավորումներից, որոնք միմյանց հետ կապված են կիսակցորդով (դույլի անիվի էքսկավատորներից շատերը) կամ տեղադրված (դույլի անիվի էքսկավատորների փոքր մոդելներ և դրանց թեթև փոփոխությունները, շղթայական էքսկավատորներ) սխեմաներից:
Որպես խրամատների էքսկավատորների փոքր մոդելների հիմնական տրակտորներ, սովորաբար, օգտագործվում են թրթուր կամ անիվային տրակտորներ `անհրաժեշտ փոխարկմամբ: Միջին և ծանր էքսկավատորների մոդելների տրակտորները հիմնականում կազմված են տրակտորային բլոկներից և մասերից ՝ պահպանելով տրակտորային պտուտակի գաղափարը, բայց հիմնական տրակտորների համեմատ ՝ հետագիծը ընդլայնելով և հիմքը երկարացնելով: Լայն կոշիկների հետ միասին դա հասնում է հողի ճնշման իջեցմանը (50 ... 80 կՊա), ինչը թույլ է տալիս այդ մեքենաներին աշխատել կրող նվազեցված հզորությամբ հողերում:
Խրամուղի էքսկավատորի աշխատանքային սարքավորումն ապահովում է հողի զանգվածից տարանջատում նախագծային խորության և լայնության խրամատի մեջ `լանջերով կամ առանց դրանց, խրամատից դրա ամբողջական հեռացում և խրամատի կողքին ընկած պարապետ (ձիավոր) թափում: Վերջին գործողությունը սովորաբար իրականացվում է աղբատարի գոտու փոխակրիչի միջոցով, որը տեղադրված է խրամատի երկայնական առանցքին ուղղահայաց, կամ ռոտորի խոռոչում (դույլի անիվի էքսկավատորների վրա) կամ տրակտորի վրա (շղթայական էքսկավատորների վրա): Նեղ խրամատների (անցքերի) զարգացման համար օգտագործվում են նաև փոխակրիչ քերիչ և ֆրեզերային խրամատների էքսկավատորներ:
Պտտվող խրամատների էքսկավատորներ
Պտտվող խրամատային էքսկավատորի աշխատանքային սարքավորումները (նկ. 139) բաղկացած են պտուտակից ՝ ռոտորից 6 տեղադրված է աջակցության վրա 5 և ուղեցույցներ 11 աշխատանքային շրջանակային գլանափաթեթներ 14 ամրացված է թաղանթի շրջանակի վրա 13 , դանակի լանջերը 12 , մերկացնելով վահանը 10 , թիկունքի աջակցություն 9 և աղբանոց տեղափոխել 4 (Նկար 139, և) Ռոտորին աջակցում են երկու օղակ 20 (Նկար 139, բ), որոնք տեղակայված են զուգահեռ հարթություններում, ծայրամասի երկայնքով ամրացված դույլերով: Լայն ռոտորների վրա դույլերը տեղադրվում են երկու շարքով, մեկ շարքի փոխհատուցմամբ `դույլի դաշինքի կեսով, այդպիսով գետնին փորելիս ռոտորին ապահովելով ավելի միատարր բեռ: Շերեփը բաղկացած է կամարից 19 իր առջևի մասում և ներքևում տեղադրված ատամներով կամ առանց դրանց 18 երկու ուղղությամբ միահյուսված շղթաներից: Դույլերը բաց են առջևում `հողի մուտքի համար, իսկ ներսից` բեռնաթափման համար:Ռոտորի աշխատանքային գործընթացի բոլոր գործողություններն իրականացվում են դրա շարունակական պտտմամբ `տրակտորի թարգմանական շարժման հետ համատեղ: Երբ դույլերը ներքևի անցքից շարժվում են ներքևից վերև, նրանք զարգացնում են հողը և լցնում դրանով: Աշխատանքային շրջանակի վրա ամրացված թաղանթը պաշտպանում է ռոտորի ներսում հողի թափվելուց 13 (Նկար 139, ժամը) բեռնաթափման գոտու սկզբում վերին եզրով: Երբ դույլերը հասնում են այս գոտի, հողը բեռնաթափվում է ռոտորի բացված ներքին խոռոչի մեջ `աղբատարի վրա: 4 և ապա վերջինը ՝ խրամատի մի կողմում գտնվող պարապետի մեջ (նկ. 139, ռ) Շղթայի շերեփի հատակները, սեփական քաշից շղթայի օղակների շարժունակության պատճառով, նպաստում են դույլերի ավելի ամբողջական դատարկմանը:
Հողի արդյունավետ զարգացման համար դույլերի ատամները դրվում են ըստ սխեմայի (նկ. 139, դ), որն իրականացնում է «խոշոր մանրացման» մեթոդը, որը բաղկացած է այն հանգամանքից, որ երկու կամ երեք նույնական խմբերից յուրաքանչյուրում, որոնք հաջորդաբար տեղակայված են դույլի ռոտորում, յուրաքանչյուր ատամ 21 շարժվում է իր սեփական շերտի երկայնքով ՝ հետևելով նախորդ խմբի ատամին նույն շերտի մեջ: Այսպիսով, երկու խմբային տեղադրմամբ, որոնք իրականացվում են ներքին խրամատային պտտվող էքսկավատորների նախագծերում և 14 դույլի ռոտորով, միայն 8-րդ դույլի ատամները շարժվում են 1-ին դույլի ատամների հետքերով, 2-րդի, 9-րդ դույլի ատամների երկայնքով և այլն: և այլն Ատամները հեռավորության վրա են գտնվում մոտավորապես նույն աստիճանի վրա `առաջատար եզրի լայնությամբ: Ատամների մաշվածության դիմադրությունը բարձրացնելու համար նրանց առջևի դեմքերը կարծրացնում են մաշվածության դիմացկուն մակերևույթով կամ ամրացմամբ BK15 կազմի վոլֆրամ-կոբալտե սալերից, որոնք կարծրությամբ համեմատելի են հողերի մեծ մասի մաս կազմող սիլիցիումի օքսիդի հետ:
Դանակի լանջեր 12 (Նկար 139, և) տեղադրվում են ռոտորի երկու կողմերում `թեք` երկայնական և լայնակի ուղղություններով `դրանք անշարժ ամրագրելով շրջանակի փակագծերի վրա: Երբ էքսկավատորը շարժվում է, նրանք լանջի գոտում հողը առանձնացնում են լեռնազանգվածից (նկ. 139, ռ), երբ այն ընկնում է, բռնում են դույլերը և դուրս բերվում բեռնաթափման ՝ դեմքի ճակատային մասում գտնվող զանգվածից առանձնացված հողի հետ միասին:
Աղբատար գոտու փոխադրիչներն ունեն նախագծման երկու տարբերակ. Փոխակրիչի գոտու աշխատանքային ճյուղի գլանաձեւ մակերևույթով ՝ կոր, տեղադրված է էքսկավատորների փոքր մոդելների վրա և երկու հատված (Նկար 139, ռ), որը բաղկացած է երկու ուղիղ հատվածներից, որոնցից մեկը `հորիզոնական, ստանում է, իսկ երկրորդը` հակված `աղբանոց: Վերջինը տեղադրվում է ստացող հատվածի պահանջվող անկյան տակ `օգտագործելով հիդրավլիկ գլան: Երկու հատվածով փոխակրիչները տեղադրվում են միջին և ծանր էքսկավատորների վրա: Երբ էքսկավատորը տեղափոխվում է տրանսպորտային դիրքի, կորի փոխակրիչը սիմետրիկորեն դրվում է էքսկավատորի երկայնական առանցքի վրա, և երկու հատվածով փոխակրիչի թափման հատվածը ծալվում է ներքև, դրանով իսկ նվազեցնելով աշխատանքային սարքավորումների ընդհանուր լայնությունը: Փոխակրիչի գոտու արագությունը չի գերազանցում 5-ը մ / վրկ.
Քերող ափսեը, որը տեղադրված է աշխատանքային շրջանակի հետևում 10 (Նկար 139, և) ծառայում է խրամատի ստորին հատվածը պրոֆիլավորելու համար `կտրելով հարակից ատամների կողմից ձևավորված լեռնաշղթաները և խրամատը քանդվող հողից մաքրելու ոչ ամբողջությամբ բեռնաթափված դույլերից, որոնք վերադառնում են հատակ: Սովորաբար այն միացված է հետևի հենակետին ՝ երկակի անիվի կամ դահուկի տեսքով: Heavyանր, ներառյալ սառեցված հողերը զարգացնելիս հետևի հենակետի մասնակի բեռնաթափման համար, պտտվող խրամատների էքսկավատորների ծանր մոդելները լրացուցիչ հագեցած են դահուկներով 8 վերահսկվում է հիդրավլիկ բալոնների միջոցով 7 , կամ աշխատանքային շրջանակի յուրաքանչյուր կողմում անիվի հենակներով, դրանք հենվելով խրամատի եզրերին:
Աշխատանքային սարքավորումները տրակտորին միացնելու համար կցորդիչ սարքն օգտագործվում է տրակտորի վրա տեղադրված ուղեցույցների երկայնքով շարժվող սահող սարքերի տեսքով, կամ հարթ փոխադարձ կապի մեխանիզմի տեսքով: 15 պտտվող աջակցությամբ 16 կամ առանց դրա: Աշխատանքային սարքավորումները խրամուղու պահանջվող խորությունը տեղադրելու, ինչպես նաև աշխատանքային I դիրքից II տեղափոխելու II դիրքը և հակառակը տեղափոխելու համար օգտագործվում են հիդրավլիկ բալոններ 1 և 3 ... Թեքման հենակետը թույլ է տալիս էքսկավատորին աշխատել ոլորանների վրա, առանց խրամատը խցանելու ռոտորը, ինչպես նաև էքսկավատորի առանցքային շարժումների ժամանակ տրանսպորտային դիրքում գտնվող կիսաավանդակ աշխատանքային սարքավորումներով:
Պտտվող խրամուղի էքսկավատորները հագեցած են ինքնավար դիզելային էլեկտրակայանով 17 ... Մեխանիկական, հիդրոմեխանիկական և էլեկտրական փոխանցումները օգտագործվում են շարժիչը շարժիչներին փոխանցելու համար (վազքի հանդերձանք, ռոտոր, աղբատար փոխակրիչ և օժանդակ սարքեր աշխատանքային սարքավորումների բարձրացման և երկբաժանի կոնվեյերի թափման հատված, տեղադրելով լրացուցիչ հենարաններ): Տրանսպորտային արագությամբ շարժման համար սովորաբար օգտագործվում է բազային տրակտորի բազմաստիճան հետադարձելի փոխանցումատուփը, իսկ գործառնական արագությամբ շարժման համար դրան միացված է սողուն, որը հանդես է գալիս որպես ռեդուկտորային հանդերձանք: Հիդրոմեխանիկական տարբերակում աշխատանքային ռեժիմում աշխատող սարքը վարում է փոփոխական պոմպից աշխատանքային հեղուկով ապահովված հիդրավլիկ շարժիչը: Այս սխեման ապահովում է արագության անխափան վերահսկում մի քանի տիրույթներում, երբ փոխանցումատուփն ու սողանը միասին են աշխատում և թույլ են տալիս ընտրել ռացիոնալ արագության ռեժիմներ ՝ կախված մշակվող հողի կատեգորիայի:
Ռոտորը մղվում է տրակտորի վրա մեխանիկական փոխանցման միջոցով, երկու երկաստիճան շղթայական կրիչներ 2 և վերջինիս յուրաքանչյուր կողմում ռոտորով ատամնավոր երկու հանդերձանքի զույգ: Աղբատար փոխարկիչի շարժումը փոխանցվում է ռոտորային շարժիչի լիսեռից շղթայական շարժիչ համակարգի միջոցով: Օգտագործվում է նաև էլեկտրական շարժիչներից ռոտորի և թափման փոխակրիչի անհատական \u200b\u200bշարժիչ ՝ սնուցված դիզելային շարժիչով աշխատող այլընտրանքով: Դրական տեղաշարժման հիդրավլիկ շարժիչը ֆիքսված պոմպերով սովորաբար օգտագործվում է օժանդակ մեխանիզմներ վարելու համար:
Պտտվող էքսկավատորն ինքնահոս պեղող և բեռնիչ մեքենա է, որը շարունակական գործողության է ենթարկվում կամ քայլում է երկաթուղային (հիմնականում հզոր ER) փոխադրման սարքավորումների վրա ՝ հեռադիտակային կամ ոչ հեռադիտային բումով, որը նախատեսված է վերին (հիմնականում) և ստորին փորվածքներով վերացման կամ հանքարդյունաբերության համար ՝ պեղումների (ալիքների) զարգացման համար ), ժայռի աղբանոց տեղափոխելը կամ ժայռի զանգվածը բեռնաթափել շարունակական կամ, ավելի հազվադեպ, ցիկլային գործողությամբ ցածր և միջին ուժի ժայռերի և ածուխների վրա (առանց նախնական թուլացման պայթյունից մինչև IV կատեգորիա, իսկ ավելի ուժեղների համար ՝ պայթյունից հետո եզրը թափահարելով) ջերմաստիճանում (եթե հատուկ նշված չէ) -40 ... + 35 ° С.
ՍՍՀՄ – ում բաց ռոտորային էքսկավատորների արդյունաբերական արտադրությունը սկսվեց 50-ականների վերջին: XX դար և ներկայումս իրականացվում է Ռուսաստանում «Կրաստյաժմաշ» ԲԲԸ-ի կողմից (Աղյուսակ 3.7.9):
Ուկրաինայում դույլի անիվի էքսկավատորներն արտադրում են Դոնեցկի մեքենաշինական գործարանը և NKMZ- ն:
Դրսում դույլի անիվների էքսկավատորների խոշորագույն արտադրողներն են Krupp Industrietechnik և Orenstein-Koppel գերմանական ընկերությունները:
Արտասահմանյան արտադրանքի արտադրությունն իրականացվում է ըստ ստանդարտ չափի շարքի, որը ներառում է հետևյալ առավելագույն պարամետրերով մեքենաների լայն տեսականի. Տեսական ժամային արտադրողականություն 20,000 մ 3 / ժամ և օրական 240,000 մ 3, փորման դիմադրության հաշվարկված գործակից մինչև 2,1 ՄՊա, ռոտորի տրամագիծը 22 մ, մինչև 6,34 մ 3 դույլի հզորությամբ, ռոտորի բումի երկարությունը 70 մ, տեղադրված էլեկտրասարքավորումների հզորությունը 15,000 կՎտ և 13,500 տոննա քաշով (ներառյալ բեռնիչ սարքը):
Պտտվող էքսկավատորի նշում ЭРШРД-5000.40 / 3-ի օրինակով. Էքսկավատոր ապրանքանիշի նշանակման սկզբնական տառեր. Էքսկավատորի տեսակը (ER - պտտվող էքսկավատոր); տրանսպորտային միջոցի տեսակ (ШР - քայլող-երկաթուղային; Г - թրթուր); նպատակը (D - հանքարդյունաբերություն կամ P - դույլի կտրող եզրին հատուկ փորող ուժի գործակիցով): Հետևյալը էքսկավատորի աշխատանքն է, մ 3 / ժ, ազատ զանգվածի համար `փորելու KF- ի դիմադրության անվանական հատուկ գործակիցով և, վերջապես, թեք գծի կետից հետո գրվում է բարձրության և փորման խորության հարաբերակցությունը, մ: Եթե էքսկավատորը ունի կենտրոնախույս ռոտոր, ապա դրա նշումը սովորաբար մուտքագրվում է ինդեքս C, եթե այն պարունակում է հետ քաշվող բում, ապա ընդլայնման արժեքը մուտքագրվում է գծիկով, մ.
Մեր երկրի լեռնահանքային ձեռնարկություններում օգտագործվում են Գերմանիայում և Չեխիայում արտադրված դույլի անիվների էքսկավատորներ (Աղյուսակ 3.7.10):
Վերջին տարիներին կրճատված (փոքր) գծային պարամետրերով դույլի անիվի էքսկավատորները սկսել են լայնորեն օգտագործվել: Նրանց շարժունակությունը և հաճախ ինքնավար շարժիչի (դիզելային վառելիքի) առկայությունը հնարավորություն են տալիս հաջողությամբ շահագործել այդ էքսկավատորները շինարարության և հողային աշխատանքներ մեծ երկարությամբ, ինչպես նաև սորուն և փոքր չափսի նյութերի բեռնման մեքենայացման ժամանակ, բաց հանքարդյունաբերության մեջ փոքր (մինչև 15 մ) տարողությամբ նստարաններ մշակելիս:
Փոքր գծային պարամետրերի պտտվող էքսկավատորներն ունեն նմանատիպ դասավորություն: Հատկանշական հատկությունների շարքում պետք է նշել. Հակակշռի ստորին տեղը (պտտաձողի շարժիչի սենյակի տակ); ռոտորի բումը բարձրացնելու համար հիդրավլիկ բալոնների առկայությունը և, որպես հետևանք, բումը աջակցելու համար նախատեսված վերնաշենքի բացակայություն. ռոտորային բումի և բեռնաթափման կոնսոլի կոաքսային դասավորություն; անհավասարակշիռ բեռնաթափման կոնսոլ; գերակառույցի սահմանափակ շրջադարձը հետևյալ տակառի համեմատ, ինչպես նաև, հիմնականում, մեխանիզմների համակցված շարժիչ ուժը (էլեկտրահիդրավլիկ և դիզելային-հիդրավլիկ)
Իրենց փոքր գծային պարամետրերի շնորհիվ այս էքսկավատորները բնութագրվում են ռոտոր-բում-կախոց-պլատֆորմային համակարգի բարձր կոշտությամբ և կարող են զարգացնել փորման կայունության բարձր հատուկ գործակիցներ (KF \u003e\u003e 2 MPa), որոնք ընդլայնում են դրանց կիրառման դաշտը կոշտ ժայռերի և ածուխների վրա:
Կենտրոնախույս ռոտորով ERGV-630.9 / 0.5Ts (նկ. 3.7.2) դույլի անիվի էքսկավատորը նախատեսված է ուժեղ հանքանյութերի արդյունահանման համար `հատուկ KF- ի փորման դիմադրության գործակիցով մինչև 2,1 ՄՊա, 690 մ 3 / ժամ ազատ զանգվածի տեսական արտադրողականություն: KF- ն իջեցնելով 1 ՄՊա-ի, տեսական արտադրողականությունը կարելի է հասցնել 1300 մ 3 / ժամի:
Իներցիոն արտանետմամբ կենտրոնախույս աշխատանքային մարմինը ուռուցիկով ապահովում է պեղված զանգվածի ֆրակցիաները
Էքսկավատորը ունի ER-630.10.5 / 1.0 մոդիֆիկացիա, որը նախատեսում է աշխատանքային սարքավորումների օգտագործում ինքնահոս ռոտոր հանքարդյունաբերության կամ զրոյացման աշխատանքների համար տեսական արտադրողականությամբ 1100 մ 3 / ժ չամրացված զանգվածով `KF \u003d 0.45 ՄՊա և 630 մ 3 փորելու դիմադրության հատուկ գործակիցով h ժամը KF \u003d \u003d 0,9 ՄՊա: Շահագործման ընթացքում շրջակա միջավայրի ջերմաստիճանի սահմանը +35 ... -20 ° С. Երկու տարբերակներում էլ էքսկավատորը ունի փոքր գծային պարամետրերով էքսկավատորին բնորոշ դասավորություն:
Էքսկավատորներ ERP-1600 և ER-1250.17 / 1.5 (ER-1250.16 / 1.5D; ER-1250.17 / 10C) փոխարինեցին ERG-350/1000, ERG-400.17 / 1.5 մոդելները:
ERP-1600 դույլ անիվի էքսկավատորը նախատեսված է KF- ով ուժեղ ոչ կպչուն օգտակար հանածոների արդյունահանման համար
ERP-1600 էքսկավատորը և դրա փոփոխումը ERP-1600C կենտրոնախույս ռոտորով ունեն նմանատիպ նախագծման սխեմաներ: Վերջին մոդելը ունի 30,4 մ բում 21,1 մ (ERP-1600) և ռոտոր 4 մ տրամագծով, դույլի հզորությունը համապատասխանաբար 4 մ / 190 լ և 7,2 մ / 420 լ: KF \u003d 1,37 MPa փորելուն դիմադրության հատուկ գործակից ունեցող երկու մոդելների նախագծային արտադրողականությունը կազմում է մոտ 1650 մ 3 / ժ:
Շերեփային անիվի էքսկավատորի հիմնական մոդելը ER-1250.17 / 1.5 նախատեսված է միջին ուժի ապարների վրա մերկացման գործողությունների համար ՝ ժայռի զանգվածը բեռնիչով տեղափոխող փոխադրիչով (դեմքի փոխակրիչ, վերալիցքավորող սարքեր, թափող մեքենա): Այն կարող է օգտագործվել բաց ածուխի հանքերում թույլ ածուխ արտադրելու համար:
ER-1250.16 / 1.5D էքսկավատորի փոփոխությունը օգտագործվում է K /- ով ոչ կպչուն օգտակար հանածոների արդյունահանման համար:
ER-1250 և ERP-1250 էքսկավատորները հնարավորինս միասնական են, ունեն անխողովակ ռոտորային անիվ և դրա շարժիչը պտտվում է պլանում, ինչը թույլ է տալիս նրանց հավասարապես արդյունավետ աշխատել երկայնական առանցքի երկու կողմերում գտնվող ուղղահայաց չիպերով: Ձևաթղթի և ռոտորի բումերն ունեն պտտման և առանցքային շարժիչների ընդհանուր առանցք, ինչը շահագործման ընթացքում ապահովում է բումերի անկախ դիրքը:
Էքսկավատոր ERP-2500- ը նախատեսված է ծանրաբեռնվածության (KF- ով\u003e 8 ՄՊա ժայռերի համար Q\u003e 2500 մ 3 / ժ նախագծային հզորությամբ) և հանքարդյունաբերության համար (ածուխների և այլ օգտակար հանածոների KF\u003e 1,4 ՄՊա-ով Q\u003e 500 մ 3 / ժ) ^\u003e 2 ՄՊա է Q\u003e 1750 մ 3 / ժ) աշխատում է: ERP-2500 էքսկավատորը օգտագործվում է PDM-2500 բեռնիչ-դոզավորող մեքենայի հետ համատեղ. համալիրները հագեցած են 6 կՎ լարման լարման մալուխների համար մալուխային շարժիչ սարքերով:
ERG-1600.40 / 10-31 էքսկավատորը միակ մոդելն էր ԽՍՀՄ-ում `հետ քաշվող բումով: Դրա արտադրողականությունը 2700 ... 4500 մ 3 / ժ է, երբ աշխատում է IV և III կատեգորիաների հողերում, փորման առավելագույն բարձրությունը և խորությունը համապատասխանաբար 40 և 10 մ են, փորելու շառավղով 33 ... 66 մ: 1970 թվականին այն փոխարինվեց ավելի հզոր մոդելներով typeРШР-5000 և ЭРШРД-5000.40 / 3 տիպերը քայլող երկաթուղային գծի վրա: Էքսկավատորները նախատեսված են ամբողջ տարվա ընթացքում, համապատասխանաբար, մերկացման և հանքարդյունաբերության համար:
ERShRD-5000 էքսկավատորի պտտվող մասը բաղկացած է. Ռոտորի ուղղանկյուն ֆերմայի բումից, որի գլխին կա սկավառակի անխողովակ ռոտոր, 16 հատ դույլերով; տարածական ճառագայթների գերակառույց; պտտվող սեղան `մեկ օղակաձեւ հանդերձանքի վրա աշխատող երեք ճոճանակի մեխանիզմով. հակակշիռ կոնսուլներ, որոնց վրա տեղակայված են բարձրացնող սարքավորումները, էլեկտրական և օժանդակ սարքավորումներով ռոտորի և տարածքի բումը բարձրացնելու մեխանիզմի պտուտակ:
Էքսկավատորի ստորին շրջանակում կան էլեկտրական սարքավորումներ, ճոճանակի մեխանիզմ, հիդրավլիկ համակարգ, իսկ արտաքին կոնսուլների վրա տեղադրված են մխոց տիպի հիդրավլիկ ճարմանդներ ՝ ավտոմեքենաների և դահուկների բարձրացման համար առանձին բալոններով: Էքսկավատորի բոլոր շարժումները վերահսկվում են վարորդի խցիկից, որը գտնվում է բումի գլխի աջ կողմում և շարժվում է ուղղահայաց հարթության վրա ուղեցույցների երկայնքով, ինչպես նաև մեքենայի ներքևի մասում տեղակայված շարժիչային խցիկից: Բեռնաթափման կոնսոլը շահագործվում է բեռնող սարքի խցիկի տնակից:
Էքսկավատորի մալուխային թմբուկին 10 կՎ լարման հետ էլեկտրամատակարարումը մատակարարվում է ճկուն մալուխի միջոցով բարձրավոլտ քարհանքի ցանցից ՝ բաշխիչ սարքի միջոցով:
Էքսկավատորը ER111RD-5250 ունի ջարդիչ, որը տեղադրված է էքսկավատորի կենտրոնական մասի աղբանոցում և ապահովում է մանրացված զանգվածի արտանետումը ստանդարտ չափի կտորով:
ERP-5250V- ի ծանրաբեռնված տարբերակը տարբերվում է հիմնականից `սարքերի առկայությամբ, որոնք նվազեցնում են ժայռի կպչումը շղթայի հատակին, գերբեռնվածության վայրերում հարվածային սարքերին և մեքենայի կենտրոնական մասում ինքնամաքրվող ջրատարներին: Էքսկավատորը պարունակում է նավահանգստի մակարդակի հարթեցում, որն աջակցում է էքսկավատորի մի ծայրին, իսկ մյուսը ՝ ինքնագլոր աջակցության սայլի վրա:
Universalամանակակից համընդհանուր ծանրաբեռնվածության և հանքարդյունաբերության հզոր դույլ անիվի էքսկավատորների տեխնիկական բնութագրերը քայլուղային գծի վրա բերված են աղյուսակում: 3.7.11.
Լրիվ տեղեկությունների համար բաժանորդագրվեք մեզ
